장애물 추가해서 탐지 기능 테스트
import math
import tkinter as tk
from tkinter import ttk, messagebox, scrolledtext
from collections import deque
from datetime import datetime
import requests
import threading
import time
# ================= 설정 및 파라미터 =================
# URL = "http://127.0.0.1:9010/control"
URL = "http://192.168.0.243:4110/control"
INTERVAL = 80 # UI 갱신 주기 (메인 스레드, 렉 방지)
FETCH_INTERVAL = 0.05 # API 폴링 주기 (백그라운드)
PATH_HISTORY_MAX = 600
CANVAS_SIZE = 600
SCALE = 1.5 # cm → px
# 도달 판정 범위 (cm)
WP_TOL = 5.0 # 도착 판정 반경 (웨이포인트/탐색)
PARK_TOL = 0.015 # 주차(복귀) 위치 오차 허용 반경
WP_ARRIVAL_CONSEC = 2 # 연속 N회 내에 있어야 도착 인정
ANGLE_TOL = 0.0087 # 주차 시 회전 완료 판정각 (약 0.5도)
# 주차 정렬(회전) 비례 제어 파라미터
PARK_ALIGN_P_GAIN = 0.8 # 비례 제어 gain (오차에 비례한 속도)
PARK_ALIGN_MAX_SPEED = 0.3 # 최대 회전 속도 (큰 오차시)
PARK_ALIGN_MIN_SPEED = 0.05 # 최소 회전 속도 (정지 직전)
# smart_move 제어 파라미터
SLOW_DIST_CM = 15.0 # 이 거리 이하에서 1차 감속
NEAR_DIST_CM = 8.0 # 이 거리 이하에서 2차 강감속
MIN_LIN_SPEED = 0.05 # 중간 구간 최소 속도
MIN_LIN_SPEED_NEAR = 0.02 # 근접 구간 최소 속도 (오버슈트 방지)
ROT_THRESHOLD = 0.52 # 이 각도 이상이면 제자리 회전만 함 (약 30도) - 먼저 회전 후 직진
ANG_GAIN = 1.8 # 각도 보정 gain
ALIGN_SLOW_THRESHOLD = 0.2 # 복귀 정렬 시 저속 회전 전환각 (rad)
ALIGN_SLOW_FACTOR = 0.3 # 저속 회전 배율 (더 정확한 정렬)
# 탐색(Search) 설정
SEARCH_RADIUS = 40.0
SEARCH_SQUARE_RADIUS = 25.0 # 사각형 패턴 반경
SEARCH_POINTS = 60
SEARCH_CIRCLE_POINTS = 30
# LIDAR 시각화 설정
DIST_DIV = 100.0
MIN_DIST = 0.10
MAX_DIST = 3.5
LIDAR_SKIP = 5 # LIDAR 표시 간격 (3→5, 렌더링 부하 감소)
PATH_DISPLAY_STEP = 2 # 경로 흔적 표시 시 2칸마다 1점 (600→300점)
LIDAR_SCALE_CM = 100 # LIDAR m → cm (DIST_DIV 적용 후)
GRID_CM = 20
GRID_COLOR = "#dddddd"
WALL_COLOR = "#7a00cc"
PATH_COLOR = "#ffcc00"
WAYPOINT_COLOR = "#007bff"
SEARCH_COLOR = "#9c27b0"
VISUAL_OFFSET = math.pi / 2
# 폰트 설정
FONT_MAIN = ("Segoe UI", 9)
FONT_BOLD = ("Segoe UI", 9, "bold")
# 유효한 탐색 패턴
VALID_PATTERNS = frozenset({"나선형", "원형", "사각형", "하트"})
# 장애물 판정 (cm 이하면 장애물로 인식)
OBSTACLE_THRESHOLD_CM = 50.0
FRONT_OBSTACLE_DISTANCE = 50.0 # 전방 장애물 감지 거리 (cm)
FRONT_OBSTACLE_COUNT = 5 # 장애물로 판정할 최소 LIDAR 포인트 수
# 장애물 회피 설정
AVOID_SIDE_DISTANCE = 30.0 # 회피 시 옆으로 이동 거리 (cm)
AVOID_FORWARD_DISTANCE = 30.0 # 회피 후 전진 거리 (cm)
# 벽/장애물 분류 파라미터
CLUSTER_DIST_JUMP_CM = 20.0 # 클러스터 분리 거리 차이 기준
WALL_MIN_LENGTH_CM = 80.0 # 벽으로 보는 최소 길이
WALL_MAX_MEAN_RESID_CM = 5.0 # 직선 적합 평균 잔차
WALL_MIN_POINTS = 6 # 벽 판단 최소 포인트 수
class RobotController(ttk.Frame):
def __init__(self, master):
super().__init__(master)
# [개발자 설정] 내부 속도 변수
self.cfg_lin_speed = 0.25
self.cfg_ang_speed = 0.6
self.rx = self.ry = self.ra = 0.0
self.start_pose = None
self.mode = "IDLE"
self.return_phase = None
self.paused_mode = None # 장애물 감지 전 모드 저장
self.lidar_data = []
self.waypoints = []
self.search_waypoints = []
self.path_history = deque(maxlen=PATH_HISTORY_MAX) # O(1) append, 자동 크기 제한
self.search_pattern = tk.StringVar(value="--선택--")
self.auto_search = tk.BooleanVar(value=False)
self.log_entries = deque(maxlen=100)
self._last_log_time = 0
self._log_interval_sec = 0.5
self._arrival_count = 0 # 도착 연속 카운트 (스쳐지나감 방지)
self._last_mode = "IDLE" # 상태 변화 감지용
# 탐색 시각화
self.search_window = None
self.search_retry = 0 # 탐색 재시도 횟수 (0 또는 1)
self.search_blocked = False # 탐색 완전 차단 여부
self.search_progress_start_dist = None # 현재 탐색 waypoint 최초 거리
self.search_progress_fail_count = 0 # 거리 감소 실패 누적 횟수
self.stop_reason = None
self.setup_ui()
threading.Thread(target=self.fetch_loop, daemon=True).start()
threading.Thread(target=self.control_loop, daemon=True).start()
self.update_loop()
self._search_path_started = False
# 탐색 경로를 반대로 뒤집어서 재탐색 시도
def reverse_search_path(self):
if self.search_waypoints:
self.search_waypoints = list(reversed(self.search_waypoints))
self._arrival_count = 0
# ================= UI 구성 =================
def setup_ui(self):
panel = tk.Frame(self, width=260, padx=10, pady=10)
panel.pack(side="left", fill="y")
tk.Label(panel, text="[ 위치 정보 ]", font=FONT_BOLD).pack(anchor="w")
self.lbl_start_pos = tk.Label(panel, text="Start: X: 0.00, Y: 0.00, A: 0.0°", fg="#666666", font=FONT_MAIN)
self.lbl_start_pos.pack(anchor="w", pady=(5, 0))
self.lbl_current_pos = tk.Label(panel, text="Current: X: 0.00, Y: 0.00, A: 0.0°",
font=FONT_BOLD, fg="#007bff")
self.lbl_current_pos.pack(anchor="w", pady=(0, 5))
self.lbl_state = tk.Label(panel, text="상태: IDLE", font=FONT_MAIN)
self.lbl_state.pack(anchor="w", pady=5)
ttk.Separator(panel, orient="horizontal").pack(fill="x", pady=8)
# 1. 일반 주행 제어
tk.Label(panel, text="[ 기본 주행 ]", font=FONT_BOLD).pack(anchor="w")
tk.Button(panel, text="포인트 따라가기", command=self.start_waypoints, font=FONT_MAIN).pack(fill="x", pady=2)
tk.Button(panel, text="최단 경로 설정", command=self.optimize_path, font=FONT_MAIN).pack(fill="x", pady=2)
tk.Button(panel, text="경로 초기화", command=self.clear_waypoints, font=FONT_MAIN).pack(fill="x", pady=2)
ttk.Separator(panel, orient="horizontal").pack(fill="x", pady=8)
# 2. 탐색(Search) 제어
tk.Label(panel, text="[ 탐색 모드 ]", font=FONT_BOLD).pack(anchor="w")
pat_combo = ttk.Combobox(panel, textvariable=self.search_pattern,
values=["나선형", "원형", "사각형", "하트"], state="readonly", font=FONT_MAIN)
pat_combo.pack(fill="x", pady=2)
tk.Checkbutton(panel, text="주행 후 자동 탐색", variable=self.auto_search, font=FONT_MAIN).pack(anchor="w")
tk.Button(panel, text="탐색 시작", command=self.start_search, font=FONT_MAIN).pack(fill="x", pady=4)
ttk.Separator(panel, orient="horizontal").pack(fill="x", pady=8)
# 3. 복귀 및 정지
tk.Label(panel, text="[ 복귀 설정 ]", font=FONT_BOLD).pack(anchor="w")
pf = tk.Frame(panel)
pf.pack(anchor="w")
self.park_var = tk.StringVar(value="BACK")
tk.Radiobutton(pf, text="전면주차", variable=self.park_var, value="FRONT", font=FONT_MAIN).pack(side="left")
tk.Radiobutton(pf, text="후면주차", variable=self.park_var, value="BACK", font=FONT_MAIN).pack(side="left")
tk.Button(panel, text="복귀하기", command=self.start_return, font=FONT_MAIN).pack(fill="x", pady=5)
tk.Button(panel, text="정지", command=self.stop_robot,
fg="white", bg="#d32f2f", font=FONT_BOLD).pack(fill="x", pady=15)
ttk.Separator(panel, orient="horizontal").pack(fill="x", pady=8)
self.btn_log_toggle = tk.Button(panel, text="📋 로그 열기", command=self.toggle_log,
font=("Segoe UI", 11, "bold"),
fg="white", bg="#2196F3",
padx=12, pady=10, cursor="hand2", relief=tk.RAISED, bd=2)
self.btn_log_toggle.pack(fill="x", pady=8)
# 중앙: 캔버스 + (접을 수 있는) 로그 패널
self.content_frame = tk.Frame(self)
self.content_frame.pack(side="right", expand=True, fill="both")
self.canvas = tk.Canvas(self.content_frame, width=CANVAS_SIZE, height=CANVAS_SIZE, bg="white")
self.canvas.pack(side="left", expand=True, fill="both")
self.canvas.bind("<Button-1>", self.add_waypoint_click)
# 로그 패널 (우측, 기본 숨김)
self.log_frame = tk.Frame(self.content_frame, width=360, bg="white", relief=tk.GROOVE, bd=1)
self.log_frame.pack_propagate(False)
self._log_visible = False
log_header = tk.Frame(self.log_frame, bg="white", pady=6)
log_header.pack(fill="x", padx=8)
tk.Label(log_header, text="[ 로봇 상태 로그 ]", font=FONT_BOLD, fg="#333", bg="white").pack(side="left")
tk.Button(log_header, text="접기", command=self.toggle_log, font=FONT_MAIN,
fg="#666", relief=tk.FLAT, cursor="hand2").pack(side="right")
self.log_text = scrolledtext.ScrolledText(
self.log_frame, wrap=tk.WORD, font=("Consolas", 9),
bg="white", fg="#333", insertbackground="#333",
relief=tk.FLAT, padx=8, pady=4
)
self.log_text.pack(expand=True, fill="both")
def toggle_log(self):
"""로그 패널 열기/접기"""
if self._log_visible:
self.log_frame.pack_forget()
self.btn_log_toggle.config(text="📋 로그 열기", bg="#2196F3")
self._log_visible = False
else:
self.log_frame.pack(side="right", fill="y")
self.btn_log_toggle.config(text="📋 로그 접기", bg="#1976D2")
self._log_visible = True
def get_obstacle_info(self):
"""LIDAR에서 장애물 방향·거리 분석. 반환: (감지여부, [(방향, 거리_cm), ...])"""
if not self.lidar_data or len(self.lidar_data) < 360:
return False, []
def get_dist_cm(deg):
idx = deg % 360
raw = self.lidar_data[idx]
if raw <= 0:
return float("inf")
d_m = raw / DIST_DIV
return d_m * 100 # m → cm
# 전방(-20~20), 좌(70~90), 우(270~290), 후방(160~200)
front = min(get_dist_cm(d) for d in range(-20, 21))
left = min(get_dist_cm(d) for d in range(70, 91))
right = min(get_dist_cm(d) for d in range(270, 291))
back = min(get_dist_cm(d) for d in range(160, 201))
obstacles = []
if front < OBSTACLE_THRESHOLD_CM:
obstacles.append(("전방", front))
if left < OBSTACLE_THRESHOLD_CM:
obstacles.append(("좌측", left))
if right < OBSTACLE_THRESHOLD_CM:
obstacles.append(("우측", right))
if back < OBSTACLE_THRESHOLD_CM:
obstacles.append(("후방", back))
return len(obstacles) > 0, obstacles
def check_front_obstacle(self):
"""전방 장애물 감지: 전방 각도 범위에서 기준 거리 이내 포인트 수"""
dists = self.get_lidar_dist_cm_list()
if not dists:
return False
# 전방 범위: 0~44도, 315~359도
front_angles = list(range(0, 45)) + list(range(315, 360))
obstacle_count = 0
for angle in front_angles:
if dists[angle] <= FRONT_OBSTACLE_DISTANCE:
obstacle_count += 1
return obstacle_count >= FRONT_OBSTACLE_COUNT
def detect_obstacle_position(self):
"""장애물 위치 판단: 'front', 'left', 'right', None"""
dists = self.get_lidar_dist_cm_list()
if not dists:
return None
types = self.classify_lidar_points(dists)
# 전방, 좌측, 우측 스캔
front_angles = list(range(0, 6)) + list(range(355, 360))
left_angles = list(range(30, 60))
right_angles = list(range(300, 330))
front_count = sum(1 for a in front_angles if dists[a] <= FRONT_OBSTACLE_DISTANCE)
left_count = sum(1 for a in left_angles if dists[a] <= FRONT_OBSTACLE_DISTANCE and types[a] == "obstacle")
right_count = sum(1 for a in right_angles if dists[a] <= FRONT_OBSTACLE_DISTANCE and types[a] == "obstacle")
# 거리 기반 개방도(평균 거리): 클수록 더 열린 공간
left_avg = sum(dists[a] for a in left_angles) / len(left_angles)
right_avg = sum(dists[a] for a in right_angles) / len(right_angles)
if front_count >= FRONT_OBSTACLE_COUNT:
# 좌우 중 더 열린 쪽으로 회피
# 1) 장애물 개수 적은 쪽 우선
# 2) 개수가 같으면 평균 거리가 먼 쪽 우선
if left_count < right_count:
return 'left'
if right_count < left_count:
return 'right'
return 'left' if left_avg >= right_avg else 'right'
return None
def get_lidar_dist_cm_list(self):
if not self.lidar_data or len(self.lidar_data) < 360:
return None
dists = []
for i in range(360):
raw = self.lidar_data[i]
if raw <= 0:
dists.append(float("inf"))
else:
dists.append((raw / DIST_DIV) * 100)
return dists
def classify_lidar_points(self, dists):
"""클러스터링 후 벽/장애물 분류. 반환: 각도 인덱스별 타입"""
types = [None] * 360
# 클러스터 분리
clusters = []
current = []
prev_dist = None
for deg in range(360):
dist = dists[deg]
if not math.isfinite(dist):
if current:
clusters.append(current)
current = []
prev_dist = None
continue
if not current:
current = [deg]
else:
if prev_dist is not None and abs(dist - prev_dist) > CLUSTER_DIST_JUMP_CM:
clusters.append(current)
current = [deg]
else:
current.append(deg)
prev_dist = dist
if current:
clusters.append(current)
# 클러스터 분류
for cluster in clusters:
if len(cluster) < WALL_MIN_POINTS:
ctype = "obstacle"
else:
pts = []
for deg in cluster:
r = dists[deg]
th = math.radians(deg)
pts.append((r * math.cos(th), r * math.sin(th)))
# 길이 추정
x0, y0 = pts[0]
x1, y1 = pts[-1]
length = math.hypot(x1 - x0, y1 - y0)
# PCA로 직선성 평가
mx = sum(p[0] for p in pts) / len(pts)
my = sum(p[1] for p in pts) / len(pts)
sxx = sum((p[0] - mx) ** 2 for p in pts) / len(pts)
syy = sum((p[1] - my) ** 2 for p in pts) / len(pts)
sxy = sum((p[0] - mx) * (p[1] - my) for p in pts) / len(pts)
trace = sxx + syy
det = sxx * syy - sxy * sxy
temp = max(0.0, (trace / 2) ** 2 - det)
lambda2 = trace / 2 - math.sqrt(temp)
mean_resid = math.sqrt(max(0.0, lambda2))
if length >= WALL_MIN_LENGTH_CM and mean_resid <= WALL_MAX_MEAN_RESID_CM:
ctype = "wall"
else:
ctype = "obstacle"
for deg in cluster:
types[deg] = ctype
# None은 장애물로 취급
for i in range(360):
if types[i] is None:
types[i] = "obstacle"
return types
def format_log_line(self):
"""현재 상태를 로그 한 줄로 포맷"""
now = datetime.now().strftime("%Y-%m-%d %H:%M:%S")
pos = f"X: {self.rx / 100:.2f}m, Y: {self.ry / 100:.2f}m"
state = self.mode
if self.mode == "RETURN" and self.return_phase:
state = f"{self.mode}({self.return_phase})"
detected, obstacles = self.get_obstacle_info()
if detected:
obs_str = " | ".join(f"{d}: {r:.0f}cm" for d, r in obstacles)
obs_info = f"감지됨 [{obs_str}]"
else:
obs_info = "없음"
# 전방 감지 대상(벽/장애물) 로그 표시
front_type = "없음"
dists = self.get_lidar_dist_cm_list()
if dists:
types = self.classify_lidar_points(dists)
front_angles = list(range(0, 45)) + list(range(315, 360))
wall_count = 0
obs_count = 0
for a in front_angles:
if dists[a] <= FRONT_OBSTACLE_DISTANCE:
if types[a] == "wall":
wall_count += 1
else:
obs_count += 1
if wall_count or obs_count:
if wall_count > obs_count:
front_type = "벽"
elif obs_count > wall_count:
front_type = "장애물"
else:
front_type = "혼합"
return f"[{now}] Pos({pos}) | 상태: {state} | 장애물: {obs_info} | 전방: {front_type}\n"
def update_log(self):
"""로그 창에 새 줄 추가"""
try:
line = self.format_log_line()
self.log_text.insert(tk.END, line)
self.log_text.see(tk.END)
# 스크롤 영역 제한 (최근 500줄)
lines = self.log_text.get("1.0", tk.END).split("\n")
if len(lines) > 500:
self.log_text.delete("1.0", f"{len(lines) - 500}.0")
except (tk.TclError, AttributeError):
pass
def fetch_loop(self):
"""API 요청 전용 스레드 - 메인(GUI) 스레드 블로킹 방지"""
while True:
try:
res = requests.get(URL, timeout=0.1).json()
p = res["p"]
self.rx, self.ry, self.ra = p["x"] * 100, p["y"] * 100, float(p["a"])
if self.start_pose is None:
self.start_pose = (self.rx, self.ry, self.ra)
self.path_history.append((self.rx, self.ry))
self.lidar_data = res.get("s", res.get("scan", []))
except (requests.RequestException, KeyError, ValueError, TypeError):
pass
time.sleep(FETCH_INTERVAL)
# ================= 핵심 제어 로직 =================
def control_loop(self):
while True:
# 전방 장애물 감지 체크 (WAYPOINT, SEARCH, RETURN 모드일 때)
if self.mode in ["WAYPOINT", "SEARCH", "RETURN"]:
obstacle_pos = self.detect_obstacle_position()
if obstacle_pos:
# 장애물 감지: 모드 저장 후 회피 시작
self.paused_mode = self.mode
self.mode = "OBSTACLE"
self.avoid_state = "DETECT"
self.send_cmd(0, 0)
time.sleep(0.1)
# ===== 탐색 중 장애물 차단 감지 =====
if self.paused_mode == "SEARCH":
# 이미 재시도까지 했으면 차단 확정
if self.search_retry >= 1:
self.search_blocked = True
# 장애물 회피 로직
if self.mode == "OBSTACLE":
if self.avoid_state == "DETECT":
# 회피 방향 결정
obstacle_pos = self.detect_obstacle_position()
if not obstacle_pos:
# ===== 장애물 회피 종료 =====
if self.paused_mode == "SEARCH":
if self.search_blocked:
# 탐색 불가능 확정
self.log_text.insert(
tk.END,
"[INFO] 장애물로 인해 탐색이 불가능합니다. 로봇을 정지합니다.\n"
)
self.log_text.see(tk.END)
self.send_cmd(0, 0)
self.mode = "IDLE"
self.search_retry = 0
self.search_blocked = False
else:
# 반대 방향 탐색 1회 시도
self.search_retry += 1
self.reverse_search_path()
self.mode = "SEARCH"
else:
self.mode = self.paused_mode
self.paused_mode = None
self.avoid_state = None
else:
# 회피 목표 설정
side_angle = self.ra + (math.pi / 2 if obstacle_pos == 'left' else -math.pi / 2)
self.avoid_target = (
self.rx + AVOID_SIDE_DISTANCE * math.cos(side_angle),
self.ry + AVOID_SIDE_DISTANCE * math.sin(side_angle)
)
self.avoid_state = "AVOID_SIDE"
elif self.avoid_state == "AVOID_SIDE":
# 옆으로 회피
if self.smart_move(*self.avoid_target, dist_tol=5.0):
# 전진 목표 설정
forward_angle = self.ra
self.avoid_target = (
self.rx + AVOID_FORWARD_DISTANCE * math.cos(forward_angle),
self.ry + AVOID_FORWARD_DISTANCE * math.sin(forward_angle)
)
self.avoid_state = "AVOID_FORWARD"
elif self.avoid_state == "AVOID_FORWARD":
# 전진
if self.smart_move(*self.avoid_target, dist_tol=5.0):
# 회피 완료: 원래 모드로 복귀
if self.paused_mode:
self.mode = self.paused_mode
self.paused_mode = None
self.avoid_state = None
self.avoid_target = None
time.sleep(0.05)
continue
if self.mode == "WAYPOINT":
self.step_waypoint()
elif self.mode == "SEARCH":
self.step_search()
elif self.mode == "RETURN":
self.step_return()
time.sleep(0.05)
def smart_move(self, tx, ty, dist_tol=WP_TOL, allow_in_place=True):
dist = math.hypot(tx - self.rx, ty - self.ry)
# 도착 판정: 연속 N회 WP_TOL 이내여야 인정 (스쳐지나감 방지)
if dist < dist_tol:
self._arrival_count += 1
if self._arrival_count >= WP_ARRIVAL_CONSEC:
self._arrival_count = 0
return True
else:
self._arrival_count = 0
ta = math.atan2(ty - self.ry, tx - self.rx)
err = (ta - self.ra + math.pi) % (2 * math.pi) - math.pi
limit_lin, limit_ang = self.cfg_lin_speed, self.cfg_ang_speed
# 2단계 감속: 15cm→8cm→근접 순으로 점진적 감속
if dist > SLOW_DIST_CM:
target_lin = limit_lin
elif dist > NEAR_DIST_CM:
target_lin = max(MIN_LIN_SPEED, limit_lin * (dist / SLOW_DIST_CM))
else:
target_lin = max(MIN_LIN_SPEED_NEAR, limit_lin * (dist / NEAR_DIST_CM) * 0.5)
if allow_in_place:
# ===== 개선된 제어 로직: 먼저 회전 정렬, 그다음 직진 =====
if abs(err) > ROT_THRESHOLD: # 각도 오차가 크면 회전만
# 큰 각도 오차: 순회전으로 먼저 정렬
rot_speed = limit_ang if abs(err) > 0.8 else limit_ang * 0.6
self.send_cmd(0, rot_speed if err > 0 else -rot_speed)
elif abs(err) > 0.1: # 작은 각도 오차: 회전+약간의 직진
# 미세 정렬 구간: 회전과 이동 혼합 (천천히)
ang_cmd = max(-limit_ang, min(limit_ang, err * ANG_GAIN))
reduced_lin = target_lin * 0.3 # 회전 중일 때 속도 30% 감소
self.send_cmd(reduced_lin, ang_cmd)
else: # 각도 정렬됨: 직진
# 정렬 완료: 순진행
self.send_cmd(target_lin, 0)
else:
# 웨이포인트는 좌표 도달 위주: 제자리 회전 없이 이동 중 보정
ang_cmd = max(-limit_ang, min(limit_ang, err * ANG_GAIN))
lin_cmd = target_lin * (0.5 if abs(err) > ROT_THRESHOLD else 1.0)
self.send_cmd(lin_cmd, ang_cmd)
return False
def step_waypoint(self):
if not self.waypoints:
if self.auto_search.get() and self.start_search():
pass # start_search가 SEARCH 모드로 전환
else:
self.stop_robot()
return
if self.smart_move(*self.waypoints[0], allow_in_place=False):
self.waypoints.pop(0)
self.send_cmd(0, 0)
time.sleep(0.1)
def step_search(self):
# 탐색 waypoint 소진 → 즉시 정지
if not self.search_waypoints:
self.send_cmd(0, 0)
self.mode = "IDLE"
self._search_path_started = False
self.search_retry = 0
self.search_blocked = False
return
target = self.search_waypoints[0]
# ===== 탐색 진행률 체크 =====
curr_dist = math.hypot(target[0] - self.rx, target[1] - self.ry)
# 최초 접근이면 기준 거리 저장
if self.search_progress_start_dist is None:
self.search_progress_start_dist = curr_dist
arrived = self.smart_move(*target)
# ===== 거리 감소 실패 판정 =====
# 기준: 시작 대비 5cm 이상 가까워지지 않으면 실패 누적
if self.search_progress_start_dist - curr_dist < 5.0:
self.search_progress_fail_count += 1
else:
# 실제로 가까워지고 있으면 실패 카운트 리셋
self.search_progress_fail_count = 0
# ===== 탐색 불가 확정 =====
if self.search_progress_fail_count >= 20:
self.stop_reason = "탐색 waypoint에 접근할 수 없어 탐색을 중단했습니다."
self.send_cmd(0, 0)
self.mode = "IDLE"
self.search_progress_start_dist = None
self.search_progress_fail_count = 0
return
if arrived:
self.search_waypoints.pop(0)
# 다음 탐색 포인트를 위해 진행률 초기화
self.search_progress_start_dist = None
self.search_progress_fail_count = 0
# 첫 탐색 포인트 도착 → 실제 탐색 시작 플래그
if not self._search_path_started:
self._search_path_started = True
if self.search_window:
self.search_window.search_started = True
# 마지막 waypoint였다면 즉시 정지
if not self.search_waypoints:
self.send_cmd(0, 0)
self.mode = "IDLE"
self._search_path_started = False
self.search_retry = 0
self.search_blocked = False
return
def step_return(self):
if not self.start_pose: return
sx, sy, sa = self.start_pose
if self.return_phase == "MOVE":
if self.smart_move(sx, sy, dist_tol=PARK_TOL):
self.send_cmd(0, 0)
self.return_phase = "ALIGN"
elif self.return_phase == "ALIGN":
# 목표 방향 결정: 전면주차면 반대(+π), 후면주차면 원래 방향
target_yaw = (sa + math.pi) % (2 * math.pi) if self.park_var.get() == "FRONT" else sa
err_yaw = (target_yaw - self.ra + math.pi) % (2 * math.pi) - math.pi
if abs(err_yaw) < ANGLE_TOL:
# 회전 완료: 정지
self.stop_robot()
else:
# 비례 제어: 오차에 비례해서 회전 속도 조정
# 큰 오차 → 빠른 속도, 작은 오차 → 느린 속도
rot_speed = abs(err_yaw) * PARK_ALIGN_P_GAIN
rot_speed = max(PARK_ALIGN_MIN_SPEED, min(PARK_ALIGN_MAX_SPEED, rot_speed))
self.send_cmd(0, rot_speed if err_yaw > 0 else -rot_speed)
# ================= 탐색 패턴 & 유틸 =================
def start_search(self):
pattern = self.search_pattern.get()
if pattern not in VALID_PATTERNS:
messagebox.showwarning("탐색 모드", "나선형, 원형, 사각형, 하트 중 패턴을 선택해 주세요.")
return False
cx, cy = (self.waypoints[-1] if self.waypoints else (self.rx, self.ry))
pts = []
if pattern == "나선형":
for i in range(SEARCH_POINTS):
t = i / SEARCH_POINTS
pts.append((
cx + SEARCH_RADIUS * t * math.cos(t * 8 * math.pi),
cy + SEARCH_RADIUS * t * math.sin(t * 8 * math.pi),
))
elif pattern == "원형":
for i in range(SEARCH_CIRCLE_POINTS):
th = 2 * math.pi * i / SEARCH_CIRCLE_POINTS
pts.append((cx + SEARCH_RADIUS * math.cos(th), cy + SEARCH_RADIUS * math.sin(th)))
elif pattern == "사각형":
r = SEARCH_SQUARE_RADIUS
for y in (-r, 0, r):
pts.append((cx - r, cy + y))
pts.append((cx + r, cy + y))
elif pattern == "하트":
for i in range(SEARCH_POINTS):
t = 2 * math.pi * i / SEARCH_POINTS
x = 16 * math.sin(t) ** 3
y = 13 * math.cos(t) - 5 * math.cos(2 * t) - 2 * math.cos(3 * t) - math.cos(4 * t)
pts.append((cx + x * 2, cy + y * 2))
self.search_waypoints = pts
# 탐색 시각화
# 먼저 탐색 경로 확정
self.search_waypoints = pts
# 그 다음 시각화 창 생성
if self.search_window is None:
self.search_window = SearchMapWindow(self, self.search_waypoints)
self.mode = "SEARCH"
self._arrival_count = 0
# ===== 탐색 진행률 초기화 =====
self.search_progress_start_dist = None
self.search_progress_fail_count = 0
# ================= 탐색 재시작 초기화 =================
self._search_path_started = False
if self.search_window:
self.search_window.robot_path.clear()
self.search_window.search_started = False
return True
def add_waypoint_click(self, event):
if len(self.waypoints) >= 5:
messagebox.showwarning("입력 제한", "웨이포인트는 최대 5개까지만 설정할 수 있습니다.")
return
cx, cy = CANVAS_SIZE // 2, CANVAS_SIZE // 2
dx, dy = (event.x - cx) / SCALE, (cy - event.y) / SCALE
d = math.hypot(dx, dy)
a = math.atan2(dy, dx) + self.ra - VISUAL_OFFSET
self.waypoints.append((self.rx + d * math.cos(a), self.ry + d * math.sin(a)))
def update_loop(self):
"""UI 전용 루프 (네트워크 없음, 메인 스레드 논블로킹)"""
if self.start_pose is not None:
self.lbl_start_pos.config(
text=(
f"Start: X: {self.start_pose[0] / 100:.2f}, Y: {self.start_pose[1] / 100:.2f}, "
f"A: {math.degrees(self.start_pose[2]):.1f}°"
)
)
self.lbl_current_pos.config(
text=(
f"Current: X: {self.rx / 100:.2f}, Y: {self.ry / 100:.2f}, "
f"A: {math.degrees(self.ra):.1f}°"
)
)
self.lbl_state.config(text=f"상태: {self.mode}")
self.draw_canvas()
# 로그: 로봇이 작동 중일 때만 주기적으로 찍음, IDLE 전환 시 1회만 찍음
is_active = self.mode != "IDLE"
mode_changed = self.mode != self._last_mode
if mode_changed and self.mode == "IDLE" and self.stop_reason:
self.log_text.insert(
tk.END,
f"[INFO] {self.stop_reason}\n"
)
self.log_text.see(tk.END)
self.stop_reason = None
if mode_changed:
self._last_log_time = time.time()
self.update_log() # 상태 변화 시 즉시 1회 로그
elif is_active and time.time() - self._last_log_time >= self._log_interval_sec:
self._last_log_time = time.time()
self.update_log() # 활동 중일 때만 주기적 로그
self._last_mode = self.mode
self.after(INTERVAL, self.update_loop)
# 탐색 시각화
if self.search_window:
try:
self.search_window.draw_lidar_obstacle(
self.rx, self.ry, self.ra, self.lidar_data
)
except tk.TclError:
self.search_window = None
# 탐색 GUI에 로봇 위치 / 경로 갱신
if self.search_window and self.mode == "SEARCH":
try:
self.search_window.update_robot(
self.rx, self.ry, self.ra
)
except tk.TclError:
self.search_window = None
def draw_canvas(self):
self.canvas.delete("all")
cx, cy = CANVAS_SIZE // 2, CANVAS_SIZE // 2
def to_canvas(wx, wy):
dx, dy = wx - self.rx, wy - self.ry
d = math.hypot(dx, dy)
a = math.atan2(dy, dx) - self.ra + VISUAL_OFFSET
return cx + d * math.cos(a) * SCALE, cy - d * math.sin(a) * SCALE
# 그리드
grid_step = int(GRID_CM * SCALE)
for i in range(0, CANVAS_SIZE, grid_step):
self.canvas.create_line(i, 0, i, CANVAS_SIZE, fill=GRID_COLOR)
self.canvas.create_line(0, i, CANVAS_SIZE, i, fill=GRID_COLOR)
# LIDAR (cos/sin 한 번만 계산)
for i in range(0, len(self.lidar_data), LIDAR_SKIP):
d = self.lidar_data[i] / DIST_DIV
if MIN_DIST < d < MAX_DIST:
ang = math.radians(i) + VISUAL_OFFSET
px = cx + d * LIDAR_SCALE_CM * math.cos(ang) * SCALE
py = cy - d * LIDAR_SCALE_CM * math.sin(ang) * SCALE
self.canvas.create_rectangle(px, py, px + 2, py + 2, fill=WALL_COLOR, outline="")
# 경로 흔적 (포인트 많을 때 샘플링으로 렌더링 부하 감소)
if len(self.path_history) > 1:
hist = list(self.path_history)
if len(hist) > 150:
hist = hist[::PATH_DISPLAY_STEP]
flat_pts = [c for pt in hist for c in to_canvas(pt[0], pt[1])]
if len(flat_pts) >= 4:
self.canvas.create_line(flat_pts, fill=PATH_COLOR, width=2)
# 웨이포인트
prev = (cx, cy)
for wx, wy in self.waypoints:
sx, sy = to_canvas(wx, wy)
self.canvas.create_line(prev[0], prev[1], sx, sy, fill=WAYPOINT_COLOR, dash=(4, 2))
self.canvas.create_oval(sx - 4, sy - 4, sx + 4, sy + 4, fill=WAYPOINT_COLOR, outline="white")
prev = (sx, sy)
# 탐색 경로
if self.search_waypoints:
s_pts = [c for pt in self.search_waypoints for c in to_canvas(pt[0], pt[1])]
if len(s_pts) >= 4:
self.canvas.create_line(s_pts, fill=SEARCH_COLOR, width=1, dash=(2, 2))
# 로봇
self.canvas.create_oval(cx - 12, cy - 12, cx + 12, cy + 12, fill="blue", width=2)
self.canvas.create_line(cx, cy, cx, cy - 25, fill="red", arrow=tk.LAST, width=3)
def start_waypoints(self):
self.mode = "WAYPOINT" if self.waypoints else "IDLE"
self._arrival_count = 0
def start_return(self):
self.return_phase = "MOVE"
self.mode = "RETURN"
self._arrival_count = 0
def stop_robot(self):
self.mode = "IDLE"
self.send_cmd(0, 0)
def clear_waypoints(self):
self.waypoints.clear()
self.search_waypoints.clear()
self.path_history.clear()
def optimize_path(self):
"""동적 프로그래밍으로 최적 경로 계산 (TSP 문제 해결)"""
if len(self.waypoints) < 2:
return
points = [(self.rx, self.ry)] + self.waypoints
n = len(points)
if n <= 2:
return
# 거리 함수
def dist(i, j):
return math.hypot(points[i][0] - points[j][0], points[i][1] - points[j][1])
# 모든 점 간 거리 행렬
dist_matrix = [[dist(i, j) for j in range(n)] for i in range(n)]
# DP[mask][i] = 방문한 점들(비트마스크), 현재 위치 i일 때의 최단거리
INF = float('inf')
dp = [[INF] * n for _ in range(1 << n)]
parent = [[-1] * n for _ in range(1 << n)]
# 시작점(0)에서 시작
dp[1][0] = 0
# 모든 부분집합 상태 순회
for mask in range(1 << n):
for u in range(n):
if dp[mask][u] == INF or not ((mask >> u) & 1):
continue
# u에서 방문하지 않은 다음 점으로
for v in range(n):
if (mask >> v) & 1: # 이미 방문
continue
new_mask = mask | (1 << v)
new_dist = dp[mask][u] + dist_matrix[u][v]
if new_dist < dp[new_mask][v]:
dp[new_mask][v] = new_dist
parent[new_mask][v] = u
# 모든 점 방문한 최종 상태에서 가장 가까운 점
full_mask = (1 << n) - 1
last = min(range(1, n), key=lambda i: dp[full_mask][i])
# 경로 역추적
path = []
mask = full_mask
curr = last
while curr != 0:
path.append(curr)
prev = parent[mask][curr]
mask ^= (1 << curr)
curr = prev
path.reverse()
# 웨이포인트만 추출
self.waypoints = [points[i] for i in path]
def send_cmd(self, lin, ang):
try:
requests.get(URL, params={"lin": f"{lin:.3f}", "ang": f"{ang:.3f}"}, timeout=0.1)
except requests.RequestException:
pass
# ___________________________________________________탐색 시각화___________________________________________________
class SearchMapWindow:
"""
탐색 전용 확대 지도 창
- world-fixed view
- 탐색 경로 전체 표시
- 장애물(LIDAR) 누적 표시
"""
def __init__(self, parent, search_waypoints):
self.win = tk.Toplevel(parent)
self.win.title("Search Map View")
self.win.geometry("700x700")
self.canvas_size = 650
self.canvas = tk.Canvas(
self.win, width=self.canvas_size, height=self.canvas_size, bg="white"
)
self.canvas.pack(expand=True, fill="both")
# 탐색 경로 고정 저장
self.search_waypoints = list(search_waypoints)
# 스케일 계산 (탐색 도형 전체가 보이도록)
xs = [p[0] for p in self.search_waypoints]
ys = [p[1] for p in self.search_waypoints]
self.min_x, self.max_x = min(xs), max(xs)
self.min_y, self.max_y = min(ys), max(ys)
span = max(self.max_x - self.min_x, self.max_y - self.min_y)
self.scale = (self.canvas_size * 0.8) / max(span, 1)
self.origin_x = self.canvas_size / 2
self.origin_y = self.canvas_size / 2
self.draw_search_path()
# 탐색 GUI에서 로봇 이동 경로 저장
self.robot_path = []
self.search_started = False
def world_to_canvas(self, x, y):
cx = self.origin_x + (x - (self.min_x + self.max_x) / 2) * self.scale
cy = self.origin_y - (y - (self.min_y + self.max_y) / 2) * self.scale
return cx, cy
def draw_search_path(self):
pts = []
for x, y in self.search_waypoints:
pts.extend(self.world_to_canvas(x, y))
if len(pts) >= 4:
self.canvas.create_line(
pts, fill=SEARCH_COLOR, width=2, dash=(3, 2)
)
def draw_lidar_obstacle(self, rx, ry, ra, lidar_data):
for i in range(0, len(lidar_data), LIDAR_SKIP):
d = lidar_data[i] / DIST_DIV
if MIN_DIST < d < MAX_DIST:
ang = math.radians(i)
wx = rx + d * 100 * math.cos(ang + ra)
wy = ry + d * 100 * math.sin(ang + ra)
cx, cy = self.world_to_canvas(wx, wy)
self.canvas.create_rectangle(
cx, cy, cx + 2, cy + 2,
fill=WALL_COLOR, outline=""
)
# ================= 로봇 시각화 (탐색 GUI 전용) =================
def update_robot(self, rx, ry, ra):
"""
탐색 GUI에서 로봇 위치 및 경로 갱신
"""
if not self.search_started:
return # 탐색 시작 전에는 기록하지 않음
self.robot_path.append((rx, ry))
self.draw_robot_path()
self.draw_robot(rx, ry, ra)
def draw_robot_path(self):
"""
지나간 로봇 경로 (노란색)
"""
if len(self.robot_path) < 2:
return
pts = []
for x, y in self.robot_path:
pts.extend(self.world_to_canvas(x, y))
if len(pts) >= 4:
self.canvas.create_line(
pts,
fill=PATH_COLOR,
width=2
)
if __name__ == "__main__":
root = tk.Tk()
root.title("Integrated Robot Controller - Request Updated")
RobotController(root).pack(expand=True, fill="both")
root.mainloop()import math
import time
from flask import Flask, request, jsonify
import threading
# =======================
# 시뮬레이션 설정
# =======================
PORT = 9010
MAP_W = 3.0 # m
MAP_H = 5.0 # m
LIDAR_RANGE = 3.5
LIDAR_RES = 360
DT = 0.05
# =======================
# 장애물 정의
# =======================
# (x1, y1, x2, y2)
OBSTACLES = [
# ===== 외곽 벽 =====
(0.0, 0.0, MAP_W, 0.0),
(MAP_W, 0.0, MAP_W, MAP_H),
(MAP_W, MAP_H, 0.0, MAP_H),
(0.0, MAP_H, 0.0, 0.0),
# ===== 내부 장애물 (이미지 참고 형태) =====
# 상단 가로 벽
(0.3, 4.8, 2.7, 4.8),
# 중앙에서 내려오는 세로 벽 (T자)
(1.5, 4.8, 1.5, 3.0),
# ===== 작은 정사각형 장애물 =====
# 크기: 0.025m × 0.025m
# 위치: 로봇 전방 0.5m (중심: 1.5, 1.1)
# 아래 변
(1.4875, 1.0875, 1.5125, 1.0875),
# 오른쪽 변
(1.5125, 1.0875, 1.5125, 1.1125),
# 위 변
(1.5125, 1.1125, 1.4875, 1.1125),
# 왼쪽 변
(1.4875, 1.1125, 1.4875, 1.0875),
]
# =======================
# 로봇 상태
# =======================
robot = {
"x": MAP_W / 2.0,
"y": 0.6,
"a": math.pi / 2,
"lin": 0.0,
"ang": 0.0,
}
lock = threading.Lock()
app = Flask(__name__)
# =======================
# 기하 유틸
# =======================
def ray_segment_intersect(rx, ry, rdx, rdy, x1, y1, x2, y2):
vx, vy = x2 - x1, y2 - y1
det = (-rdx * vy + rdy * vx)
if abs(det) < 1e-6:
return None
s = (-vy * (x1 - rx) + vx * (y1 - ry)) / det
t = ( rdx * (y1 - ry) - rdy * (x1 - rx)) / det
if s >= 0 and 0 <= t <= 1:
return s
return None
def cast_ray(x, y, ang):
dx = math.cos(ang)
dy = math.sin(ang)
min_d = LIDAR_RANGE
for (x1, y1, x2, y2) in OBSTACLES:
d = ray_segment_intersect(x, y, dx, dy, x1, y1, x2, y2)
if d is not None and d < min_d:
min_d = d
return min_d
# =======================
# LiDAR 생성
# =======================
def generate_lidar():
scan = []
for i in range(LIDAR_RES):
ang = robot["a"] + math.radians(i)
d = cast_ray(robot["x"], robot["y"], ang)
scan.append(int(d * 100)) # cm
return scan
# =======================
# 물리 업데이트
# =======================
def sim_loop():
while True:
with lock:
robot["a"] += robot["ang"] * DT
robot["x"] += math.cos(robot["a"]) * robot["lin"] * DT
robot["y"] += math.sin(robot["a"]) * robot["lin"] * DT
# 맵 바깥 방지
robot["x"] = max(0.05, min(MAP_W - 0.05, robot["x"]))
robot["y"] = max(0.05, min(MAP_H - 0.05, robot["y"]))
time.sleep(DT)
# =======================
# API
# =======================
@app.route("/control", methods=["GET"])
def control():
with lock:
if "lin" in request.args:
robot["lin"] = float(request.args["lin"])
if "ang" in request.args:
robot["ang"] = float(request.args["ang"])
return jsonify({
"p": {
"x": robot["x"],
"y": robot["y"],
"a": robot["a"]
},
"s": generate_lidar()
})
# =======================
# 실행
# =======================
if __name__ == "__main__":
threading.Thread(target=sim_loop, daemon=True).start()
print("Sim server running on port 9010")
app.run(host="0.0.0.0", port=PORT, debug=False)
DB 연결 + 로그 나누기
import math
import tkinter as tk
from tkinter import ttk, messagebox, scrolledtext
from collections import deque
from datetime import datetime
import requests
import threading
import time
import mysql.connector
db_conn = mysql.connector.connect(
host="192.168.0.187",
port=3306,
user="root",
password="0000",
database="group1",
autocommit=True
)
db_cursor = db_conn.cursor()
# ================= 설정 및 파라미터 =================
URL = "http://127.0.0.1:9010/control"
# URL = "http://192.168.0.243:9088/control"
INTERVAL = 80 # UI 갱신 주기 (메인 스레드, 렉 방지)
FETCH_INTERVAL = 0.05 # API 폴링 주기 (백그라운드)
PATH_HISTORY_MAX = 600
CANVAS_SIZE = 600
SCALE = 1.5 # cm → px
# 도달 판정 범위 (cm)
WP_TOL = 5.0 # 도착 판정 반경 (웨이포인트/탐색)
PARK_TOL = 0.015 # 주차(복귀) 위치 오차 허용 반경
WP_ARRIVAL_CONSEC = 2 # 연속 N회 내에 있어야 도착 인정
ANGLE_TOL = 0.0087 # 주차 시 회전 완료 판정각 (약 0.5도)
# 주차 정렬(회전) 비례 제어 파라미터
PARK_ALIGN_P_GAIN = 0.8 # 비례 제어 gain (오차에 비례한 속도)
PARK_ALIGN_MAX_SPEED = 0.3 # 최대 회전 속도 (큰 오차시)
PARK_ALIGN_MIN_SPEED = 0.05 # 최소 회전 속도 (정지 직전)
# smart_move 제어 파라미터
SLOW_DIST_CM = 15.0 # 이 거리 이하에서 1차 감속
NEAR_DIST_CM = 8.0 # 이 거리 이하에서 2차 강감속
MIN_LIN_SPEED = 0.05 # 중간 구간 최소 속도
MIN_LIN_SPEED_NEAR = 0.02 # 근접 구간 최소 속도 (오버슈트 방지)
ROT_THRESHOLD = 0.52 # 이 각도 이상이면 제자리 회전만 함 (약 30도) - 먼저 회전 후 직진
ANG_GAIN = 1.8 # 각도 보정 gain
ALIGN_SLOW_THRESHOLD = 0.2 # 복귀 정렬 시 저속 회전 전환각 (rad)
ALIGN_SLOW_FACTOR = 0.3 # 저속 회전 배율 (더 정확한 정렬)
# 탐색(Search) 설정
SEARCH_RADIUS = 40.0
SEARCH_SQUARE_RADIUS = 25.0 # 사각형 패턴 반경
SEARCH_POINTS = 60
SEARCH_CIRCLE_POINTS = 30
# LIDAR 시각화 설정
DIST_DIV = 100.0
MIN_DIST = 0.10
MAX_DIST = 3.5
LIDAR_SKIP = 5 # LIDAR 표시 간격 (3→5, 렌더링 부하 감소)
PATH_DISPLAY_STEP = 2 # 경로 흔적 표시 시 2칸마다 1점 (600→300점)
LIDAR_SCALE_CM = 100 # LIDAR m → cm (DIST_DIV 적용 후)
GRID_CM = 20
GRID_COLOR = "#dddddd"
WALL_COLOR = "#7a00cc"
PATH_COLOR = "#ffcc00"
WAYPOINT_COLOR = "#007bff"
SEARCH_COLOR = "#9c27b0"
VISUAL_OFFSET = math.pi / 2
# 폰트 설정
FONT_MAIN = ("Segoe UI", 9)
FONT_BOLD = ("Segoe UI", 9, "bold")
# 유효한 탐색 패턴
VALID_PATTERNS = frozenset({"나선형", "원형", "사각형", "하트"})
# 장애물 판정 (cm 이하면 장애물로 인식)
OBSTACLE_THRESHOLD_CM = 50.0
FRONT_OBSTACLE_DISTANCE = 50.0 # 전방 장애물 감지 거리 (cm)
FRONT_OBSTACLE_COUNT = 5 # 장애물로 판정할 최소 LIDAR 포인트 수
# 장애물 회피 설정
AVOID_SIDE_DISTANCE = 30.0 # 회피 시 옆으로 이동 거리 (cm)
AVOID_FORWARD_DISTANCE = 30.0 # 회피 후 전진 거리 (cm)
# 벽/장애물 분류 파라미터
CLUSTER_DIST_JUMP_CM = 20.0 # 클러스터 분리 거리 차이 기준
WALL_MIN_LENGTH_CM = 80.0 # 벽으로 보는 최소 길이
WALL_MAX_MEAN_RESID_CM = 5.0 # 직선 적합 평균 잔차
WALL_MIN_POINTS = 6 # 벽 판단 최소 포인트 수
class RobotController(ttk.Frame):
def __init__(self, master):
super().__init__(master)
# [개발자 설정] 내부 속도 변수
self.cfg_lin_speed = 0.25
self.cfg_ang_speed = 0.6
self.rx = self.ry = self.ra = 0.0
self.start_pose = None
self.mode = "IDLE"
self.return_phase = None
self.paused_mode = None # 장애물 감지 전 모드 저장
self.lidar_data = []
self.waypoints = []
self.search_waypoints = []
self.path_history = deque(maxlen=PATH_HISTORY_MAX) # O(1) append, 자동 크기 제한
self.search_pattern = tk.StringVar(value="--선택--")
self.auto_search = tk.BooleanVar(value=False)
self.log_entries = deque(maxlen=100)
self._last_log_time = 0
self._log_interval_sec = 0.5
self._arrival_count = 0 # 도착 연속 카운트 (스쳐지나감 방지)
self._last_mode = "IDLE" # 상태 변화 감지용
# 탐색 시각화
self.search_window = None
self.search_retry = 0 # 탐색 재시도 횟수 (0 또는 1)
self.search_blocked = False # 탐색 완전 차단 여부
self.search_progress_start_dist = None # 현재 탐색 waypoint 최초 거리
self.search_progress_fail_count = 0 # 거리 감소 실패 누적 횟수
self.stop_reason = None
self.setup_ui()
threading.Thread(target=self.fetch_loop, daemon=True).start()
threading.Thread(target=self.control_loop, daemon=True).start()
self.update_loop()
self._search_path_started = False
# 탐색 경로를 반대로 뒤집어서 재탐색 시도
def reverse_search_path(self):
if self.search_waypoints:
self.search_waypoints = list(reversed(self.search_waypoints))
self._arrival_count = 0
# ================= UI 구성 =================
def setup_ui(self):
panel = tk.Frame(self, width=260, padx=10, pady=10)
panel.pack(side="left", fill="y")
tk.Label(panel, text="[ 위치 정보 ]", font=FONT_BOLD).pack(anchor="w")
self.lbl_start_pos = tk.Label(panel, text="Start: X: 0.00, Y: 0.00, A: 0.0°", fg="#666666", font=FONT_MAIN)
self.lbl_start_pos.pack(anchor="w", pady=(5, 0))
self.lbl_current_pos = tk.Label(panel, text="Current: X: 0.00, Y: 0.00, A: 0.0°",
font=FONT_BOLD, fg="#007bff")
self.lbl_current_pos.pack(anchor="w", pady=(0, 5))
self.lbl_state = tk.Label(panel, text="상태: IDLE", font=FONT_MAIN)
self.lbl_state.pack(anchor="w", pady=5)
ttk.Separator(panel, orient="horizontal").pack(fill="x", pady=8)
# 1. 일반 주행 제어
tk.Label(panel, text="[ 기본 주행 ]", font=FONT_BOLD).pack(anchor="w")
tk.Button(panel, text="포인트 따라가기", command=self.start_waypoints, font=FONT_MAIN).pack(fill="x", pady=2)
tk.Button(panel, text="최단 경로 설정", command=self.optimize_path, font=FONT_MAIN).pack(fill="x", pady=2)
tk.Button(panel, text="경로 초기화", command=self.clear_waypoints, font=FONT_MAIN).pack(fill="x", pady=2)
ttk.Separator(panel, orient="horizontal").pack(fill="x", pady=8)
# 2. 탐색(Search) 제어
tk.Label(panel, text="[ 탐색 모드 ]", font=FONT_BOLD).pack(anchor="w")
pat_combo = ttk.Combobox(panel, textvariable=self.search_pattern,
values=["나선형", "원형", "사각형", "하트"], state="readonly", font=FONT_MAIN)
pat_combo.pack(fill="x", pady=2)
tk.Checkbutton(panel, text="주행 후 자동 탐색", variable=self.auto_search, font=FONT_MAIN).pack(anchor="w")
tk.Button(panel, text="탐색 시작", command=self.start_search, font=FONT_MAIN).pack(fill="x", pady=4)
ttk.Separator(panel, orient="horizontal").pack(fill="x", pady=8)
# 3. 복귀 및 정지
tk.Label(panel, text="[ 복귀 설정 ]", font=FONT_BOLD).pack(anchor="w")
pf = tk.Frame(panel)
pf.pack(anchor="w")
self.park_var = tk.StringVar(value="BACK")
tk.Radiobutton(pf, text="전면주차", variable=self.park_var, value="FRONT", font=FONT_MAIN).pack(side="left")
tk.Radiobutton(pf, text="후면주차", variable=self.park_var, value="BACK", font=FONT_MAIN).pack(side="left")
tk.Button(panel, text="복귀하기", command=self.start_return, font=FONT_MAIN).pack(fill="x", pady=5)
tk.Button(panel, text="정지", command=self.stop_robot,
fg="white", bg="#d32f2f", font=FONT_BOLD).pack(fill="x", pady=15)
ttk.Separator(panel, orient="horizontal").pack(fill="x", pady=8)
self.btn_log_toggle = tk.Button(panel, text="📋 로그 열기", command=self.toggle_log,
font=("Segoe UI", 11, "bold"),
fg="white", bg="#2196F3",
padx=12, pady=10, cursor="hand2", relief=tk.RAISED, bd=2)
self.btn_log_toggle.pack(fill="x", pady=8)
# 중앙: 캔버스 + (접을 수 있는) 로그 패널
self.content_frame = tk.Frame(self)
self.content_frame.pack(side="right", expand=True, fill="both")
self.canvas = tk.Canvas(self.content_frame, width=CANVAS_SIZE, height=CANVAS_SIZE, bg="white")
self.canvas.pack(side="left", expand=True, fill="both")
self.canvas.bind("<Button-1>", self.add_waypoint_click)
# 로그 패널 (우측, 기본 숨김)
self.log_frame = tk.Frame(self.content_frame, width=360, bg="white", relief=tk.GROOVE, bd=1)
self.log_frame.pack_propagate(False)
self._log_visible = False
log_header = tk.Frame(self.log_frame, bg="white", pady=6)
log_header.pack(fill="x", padx=8)
tk.Label(log_header, text="[ 로봇 상태 로그 ]", font=FONT_BOLD, fg="#333", bg="white").pack(side="left")
tk.Button(log_header, text="접기", command=self.toggle_log, font=FONT_MAIN,
fg="#666", relief=tk.FLAT, cursor="hand2").pack(side="right")
self.log_text = scrolledtext.ScrolledText(
self.log_frame, wrap=tk.WORD, font=("Consolas", 9),
bg="white", fg="#333", insertbackground="#333",
relief=tk.FLAT, padx=8, pady=4
)
self.log_text.pack(expand=True, fill="both")
def toggle_log(self):
"""로그 패널 열기/접기"""
if self._log_visible:
self.log_frame.pack_forget()
self.btn_log_toggle.config(text="📋 로그 열기", bg="#2196F3")
self._log_visible = False
else:
self.log_frame.pack(side="right", fill="y")
self.btn_log_toggle.config(text="📋 로그 접기", bg="#1976D2")
self._log_visible = True
def get_obstacle_info(self):
"""LIDAR에서 장애물 방향·거리 분석. 반환: (감지여부, [(방향, 거리_cm), ...])"""
if not self.lidar_data or len(self.lidar_data) < 360:
return False, []
def get_dist_cm(deg):
idx = deg % 360
raw = self.lidar_data[idx]
if raw <= 0:
return float("inf")
d_m = raw / DIST_DIV
return d_m * 100 # m → cm
# 전방(-20~20), 좌(70~90), 우(270~290), 후방(160~200)
front = min(get_dist_cm(d) for d in range(-20, 21))
left = min(get_dist_cm(d) for d in range(70, 91))
right = min(get_dist_cm(d) for d in range(270, 291))
back = min(get_dist_cm(d) for d in range(160, 201))
obstacles = []
if front < OBSTACLE_THRESHOLD_CM:
obstacles.append(("전방", front))
if left < OBSTACLE_THRESHOLD_CM:
obstacles.append(("좌측", left))
if right < OBSTACLE_THRESHOLD_CM:
obstacles.append(("우측", right))
if back < OBSTACLE_THRESHOLD_CM:
obstacles.append(("후방", back))
return len(obstacles) > 0, obstacles
def check_front_obstacle(self):
"""전방 장애물 감지: 전방 각도 범위에서 기준 거리 이내 포인트 수"""
dists = self.get_lidar_dist_cm_list()
if not dists:
return False
# 전방 범위: 0~44도, 315~359도
front_angles = list(range(0, 45)) + list(range(315, 360))
obstacle_count = 0
for angle in front_angles:
if dists[angle] <= FRONT_OBSTACLE_DISTANCE:
obstacle_count += 1
return obstacle_count >= FRONT_OBSTACLE_COUNT
def detect_obstacle_position(self):
"""장애물 위치 판단: 'front', 'left', 'right', None"""
dists = self.get_lidar_dist_cm_list()
if not dists:
return None
types = self.classify_lidar_points(dists)
# 전방, 좌측, 우측 스캔
front_angles = list(range(0, 6)) + list(range(355, 360))
left_angles = list(range(30, 60))
right_angles = list(range(300, 330))
front_count = sum(1 for a in front_angles if dists[a] <= FRONT_OBSTACLE_DISTANCE)
left_count = sum(1 for a in left_angles if dists[a] <= FRONT_OBSTACLE_DISTANCE and types[a] == "obstacle")
right_count = sum(1 for a in right_angles if dists[a] <= FRONT_OBSTACLE_DISTANCE and types[a] == "obstacle")
# 거리 기반 개방도(평균 거리): 클수록 더 열린 공간
left_avg = sum(dists[a] for a in left_angles) / len(left_angles)
right_avg = sum(dists[a] for a in right_angles) / len(right_angles)
if front_count >= FRONT_OBSTACLE_COUNT:
# 좌우 중 더 열린 쪽으로 회피
# 1) 장애물 개수 적은 쪽 우선
# 2) 개수가 같으면 평균 거리가 먼 쪽 우선
if left_count < right_count:
return 'left'
if right_count < left_count:
return 'right'
return 'left' if left_avg >= right_avg else 'right'
return None
def get_lidar_dist_cm_list(self):
if not self.lidar_data or len(self.lidar_data) < 360:
return None
dists = []
for i in range(360):
raw = self.lidar_data[i]
if raw <= 0:
dists.append(float("inf"))
else:
dists.append((raw / DIST_DIV) * 100)
return dists
def classify_lidar_points(self, dists):
"""클러스터링 후 벽/장애물 분류. 반환: 각도 인덱스별 타입"""
types = [None] * 360
# 클러스터 분리
clusters = []
current = []
prev_dist = None
for deg in range(360):
dist = dists[deg]
if not math.isfinite(dist):
if current:
clusters.append(current)
current = []
prev_dist = None
continue
if not current:
current = [deg]
else:
if prev_dist is not None and abs(dist - prev_dist) > CLUSTER_DIST_JUMP_CM:
clusters.append(current)
current = [deg]
else:
current.append(deg)
prev_dist = dist
if current:
clusters.append(current)
# 클러스터 분류
for cluster in clusters:
if len(cluster) < WALL_MIN_POINTS:
ctype = "obstacle"
else:
pts = []
for deg in cluster:
r = dists[deg]
th = math.radians(deg)
pts.append((r * math.cos(th), r * math.sin(th)))
# 길이 추정
x0, y0 = pts[0]
x1, y1 = pts[-1]
length = math.hypot(x1 - x0, y1 - y0)
# PCA로 직선성 평가
mx = sum(p[0] for p in pts) / len(pts)
my = sum(p[1] for p in pts) / len(pts)
sxx = sum((p[0] - mx) ** 2 for p in pts) / len(pts)
syy = sum((p[1] - my) ** 2 for p in pts) / len(pts)
sxy = sum((p[0] - mx) * (p[1] - my) for p in pts) / len(pts)
trace = sxx + syy
det = sxx * syy - sxy * sxy
temp = max(0.0, (trace / 2) ** 2 - det)
lambda2 = trace / 2 - math.sqrt(temp)
mean_resid = math.sqrt(max(0.0, lambda2))
if length >= WALL_MIN_LENGTH_CM and mean_resid <= WALL_MAX_MEAN_RESID_CM:
ctype = "wall"
else:
ctype = "obstacle"
for deg in cluster:
types[deg] = ctype
# None은 장애물로 취급
for i in range(360):
if types[i] is None:
types[i] = "obstacle"
return types
def format_log_line(self):
"""현재 상태를 로그 한 줄로 포맷"""
now = datetime.now().strftime("%Y-%m-%d %H:%M:%S")
pos = f"X: {self.rx / 100:.2f}m, Y: {self.ry / 100:.2f}m"
state = self.mode
if self.stop_reason:
state = f"{self.mode} (STOP)"
if self.mode == "RETURN" and self.return_phase:
state = f"{self.mode}({self.return_phase})"
detected, obstacles = self.get_obstacle_info()
if detected:
obs_str = " | ".join(f"{d}: {r:.0f}cm" for d, r in obstacles)
obs_info = f"감지됨 [{obs_str}]"
else:
obs_info = "없음"
# 전방 감지 대상(벽/장애물) 로그 표시
front_type = "없음"
dists = self.get_lidar_dist_cm_list()
if dists:
types = self.classify_lidar_points(dists)
front_angles = list(range(0, 45)) + list(range(315, 360))
wall_count = 0
obs_count = 0
for a in front_angles:
if dists[a] <= FRONT_OBSTACLE_DISTANCE:
if types[a] == "wall":
wall_count += 1
else:
obs_count += 1
if wall_count or obs_count:
if wall_count > obs_count:
front_type = "벽"
elif obs_count > wall_count:
front_type = "장애물"
else:
front_type = "혼합"
return f"[{now}] Pos({pos}) | 상태: {state} | 장애물: {obs_info} | 전방: {front_type}\n"
def update_log(self):
try:
# =========================
# 1) 기존 로그 문자열
# =========================
line = self.format_log_line()
# =========================
# 2) 상태(state)
# =========================
state = self.mode
if self.mode == "RETURN" and self.return_phase:
state = f"{self.mode}({self.return_phase})"
# =========================
# 3) 위치 (m 단위)
# =========================
pos_x = self.rx / 100.0
pos_y = self.ry / 100.0
# =========================
# 4) 장애물 정보
# =========================
detected, obstacles = self.get_obstacle_info()
obstacle_flag = bool(detected)
obstacle_desc = None
if detected and obstacles:
# 예: "전방:48cm, 좌측:32cm"
obstacle_desc = ", ".join(
f"{direction}:{int(dist)}cm"
for direction, dist in obstacles
)
# =========================
# 5) 전방 타입
# =========================
front_type = "없음"
dists = self.get_lidar_dist_cm_list()
if dists:
types = self.classify_lidar_points(dists)
front_angles = list(range(0, 45)) + list(range(315, 360))
wall_cnt = 0
obs_cnt = 0
for a in front_angles:
if dists[a] <= FRONT_OBSTACLE_DISTANCE:
if types[a] == "wall":
wall_cnt += 1
else:
obs_cnt += 1
if wall_cnt > obs_cnt:
front_type = "벽"
elif obs_cnt > wall_cnt:
front_type = "장애물"
elif wall_cnt or obs_cnt:
front_type = "혼합"
# =========================
# 6) tkinter 로그 출력 (기존)
# =========================
self.log_text.insert(tk.END, line)
self.log_text.see(tk.END)
# =========================
# 7) DB 저장 (핵심)
# =========================
db_cursor.execute(
"""
INSERT INTO log (
source, level, message,
rx, ry, theta,
state, pos_x, pos_y,
obstacle, obstacle_desc, front_type
)
VALUES (%s, %s, %s, %s, %s, %s, %s, %s, %s, %s, %s, %s)
""",
(
"draw3_0",
"INFO",
line.strip(),
self.rx,
self.ry,
self.ra,
state,
pos_x,
pos_y,
obstacle_flag,
obstacle_desc,
front_type,
)
)
except Exception as e:
# 로그 저장 실패로 전체 프로그램이 죽지 않게 보호
pass
def fetch_loop(self):
"""API 요청 전용 스레드 - 메인(GUI) 스레드 블로킹 방지"""
while True:
try:
res = requests.get(URL, timeout=0.1).json()
p = res["p"]
self.rx, self.ry, self.ra = p["x"] * 100, p["y"] * 100, float(p["a"])
if self.start_pose is None:
self.start_pose = (self.rx, self.ry, self.ra)
self.path_history.append((self.rx, self.ry))
self.lidar_data = res.get("s", res.get("scan", []))
except (requests.RequestException, KeyError, ValueError, TypeError):
pass
time.sleep(FETCH_INTERVAL)
# ================= 핵심 제어 로직 =================
def control_loop(self):
while True:
# 전방 장애물 감지 체크 (WAYPOINT, SEARCH, RETURN 모드일 때)
if self.mode in ["WAYPOINT", "SEARCH", "RETURN"]:
obstacle_pos = self.detect_obstacle_position()
if obstacle_pos:
# 장애물 감지: 모드 저장 후 회피 시작
self.paused_mode = self.mode
self.mode = "OBSTACLE"
self.avoid_state = "DETECT"
self.send_cmd(0, 0)
time.sleep(0.1)
# ===== 탐색 중 장애물 차단 감지 =====
if self.paused_mode == "SEARCH":
# 이미 재시도까지 했으면 차단 확정
if self.search_retry >= 1:
self.search_blocked = True
# 장애물 회피 로직
if self.mode == "OBSTACLE":
if self.avoid_state == "DETECT":
# 회피 방향 결정
obstacle_pos = self.detect_obstacle_position()
if not obstacle_pos:
# ===== 장애물 회피 종료 =====
if self.paused_mode == "SEARCH":
if self.search_blocked:
# 탐색 불가능 확정
self.stop_reason = "장애물로 인해 탐색이 불가능합니다. 로봇을 정지합니다."
self.send_cmd(0, 0)
self.mode = "IDLE"
self.search_retry = 0
self.search_blocked = False
else:
# 반대 방향 탐색 1회 시도
self.search_retry += 1
self.reverse_search_path()
self.mode = "SEARCH"
else:
self.mode = self.paused_mode
self.paused_mode = None
self.avoid_state = None
else:
# 회피 목표 설정
side_angle = self.ra + (math.pi / 2 if obstacle_pos == 'left' else -math.pi / 2)
self.avoid_target = (
self.rx + AVOID_SIDE_DISTANCE * math.cos(side_angle),
self.ry + AVOID_SIDE_DISTANCE * math.sin(side_angle)
)
self.avoid_state = "AVOID_SIDE"
elif self.avoid_state == "AVOID_SIDE":
# 옆으로 회피
if self.smart_move(*self.avoid_target, dist_tol=5.0):
# 전진 목표 설정
forward_angle = self.ra
self.avoid_target = (
self.rx + AVOID_FORWARD_DISTANCE * math.cos(forward_angle),
self.ry + AVOID_FORWARD_DISTANCE * math.sin(forward_angle)
)
self.avoid_state = "AVOID_FORWARD"
elif self.avoid_state == "AVOID_FORWARD":
# 전진
if self.smart_move(*self.avoid_target, dist_tol=5.0):
# 회피 완료: 원래 모드로 복귀
if self.paused_mode:
self.mode = self.paused_mode
self.paused_mode = None
self.avoid_state = None
self.avoid_target = None
time.sleep(0.05)
continue
if self.mode == "WAYPOINT":
self.step_waypoint()
elif self.mode == "SEARCH":
self.step_search()
elif self.mode == "RETURN":
self.step_return()
time.sleep(0.05)
def smart_move(self, tx, ty, dist_tol=WP_TOL, allow_in_place=True):
dist = math.hypot(tx - self.rx, ty - self.ry)
# 도착 판정: 연속 N회 WP_TOL 이내여야 인정 (스쳐지나감 방지)
if dist < dist_tol:
self._arrival_count += 1
if self._arrival_count >= WP_ARRIVAL_CONSEC:
self._arrival_count = 0
return True
else:
self._arrival_count = 0
ta = math.atan2(ty - self.ry, tx - self.rx)
err = (ta - self.ra + math.pi) % (2 * math.pi) - math.pi
limit_lin, limit_ang = self.cfg_lin_speed, self.cfg_ang_speed
# 2단계 감속: 15cm→8cm→근접 순으로 점진적 감속
if dist > SLOW_DIST_CM:
target_lin = limit_lin
elif dist > NEAR_DIST_CM:
target_lin = max(MIN_LIN_SPEED, limit_lin * (dist / SLOW_DIST_CM))
else:
target_lin = max(MIN_LIN_SPEED_NEAR, limit_lin * (dist / NEAR_DIST_CM) * 0.5)
if allow_in_place:
# ===== 개선된 제어 로직: 먼저 회전 정렬, 그다음 직진 =====
if abs(err) > ROT_THRESHOLD: # 각도 오차가 크면 회전만
# 큰 각도 오차: 순회전으로 먼저 정렬
rot_speed = limit_ang if abs(err) > 0.8 else limit_ang * 0.6
self.send_cmd(0, rot_speed if err > 0 else -rot_speed)
elif abs(err) > 0.1: # 작은 각도 오차: 회전+약간의 직진
# 미세 정렬 구간: 회전과 이동 혼합 (천천히)
ang_cmd = max(-limit_ang, min(limit_ang, err * ANG_GAIN))
reduced_lin = target_lin * 0.3 # 회전 중일 때 속도 30% 감소
self.send_cmd(reduced_lin, ang_cmd)
else: # 각도 정렬됨: 직진
# 정렬 완료: 순진행
self.send_cmd(target_lin, 0)
else:
# 웨이포인트는 좌표 도달 위주: 제자리 회전 없이 이동 중 보정
ang_cmd = max(-limit_ang, min(limit_ang, err * ANG_GAIN))
lin_cmd = target_lin * (0.5 if abs(err) > ROT_THRESHOLD else 1.0)
self.send_cmd(lin_cmd, ang_cmd)
return False
def step_waypoint(self):
if not self.waypoints:
if self.auto_search.get() and self.start_search():
pass # start_search가 SEARCH 모드로 전환
else:
self.stop_robot()
return
if self.smart_move(*self.waypoints[0], allow_in_place=False):
self.waypoints.pop(0)
self.send_cmd(0, 0)
time.sleep(0.1)
def step_search(self):
# 탐색 waypoint 소진 → 즉시 정지
if not self.search_waypoints:
self.send_cmd(0, 0)
self.mode = "IDLE"
self._search_path_started = False
self.search_retry = 0
self.search_blocked = False
return
target = self.search_waypoints[0]
# ===== 탐색 진행률 체크 =====
curr_dist = math.hypot(target[0] - self.rx, target[1] - self.ry)
# 최초 접근이면 기준 거리 저장
if self.search_progress_start_dist is None:
self.search_progress_start_dist = curr_dist
arrived = self.smart_move(*target)
# ===== 거리 감소 실패 판정 =====
# 기준: 시작 대비 5cm 이상 가까워지지 않으면 실패 누적
if self.search_progress_start_dist - curr_dist < 5.0:
self.search_progress_fail_count += 1
else:
# 실제로 가까워지고 있으면 실패 카운트 리셋
self.search_progress_fail_count = 0
# ===== 탐색 불가 확정 =====
if self.search_progress_fail_count >= 20:
self.stop_reason = "탐색 waypoint에 접근할 수 없어 탐색을 중단했습니다."
self.send_cmd(0, 0)
self.mode = "IDLE"
self.search_progress_start_dist = None
self.search_progress_fail_count = 0
return
if arrived:
self.search_waypoints.pop(0)
# 다음 탐색 포인트를 위해 진행률 초기화
self.search_progress_start_dist = None
self.search_progress_fail_count = 0
# 첫 탐색 포인트 도착 → 실제 탐색 시작 플래그
if not self._search_path_started:
self._search_path_started = True
if self.search_window:
self.search_window.search_started = True
# 마지막 waypoint였다면 즉시 정지
if not self.search_waypoints:
self.send_cmd(0, 0)
self.mode = "IDLE"
self._search_path_started = False
self.search_retry = 0
self.search_blocked = False
return
def step_return(self):
if not self.start_pose: return
sx, sy, sa = self.start_pose
if self.return_phase == "MOVE":
if self.smart_move(sx, sy, dist_tol=PARK_TOL):
self.send_cmd(0, 0)
self.return_phase = "ALIGN"
elif self.return_phase == "ALIGN":
# 목표 방향 결정: 전면주차면 반대(+π), 후면주차면 원래 방향
target_yaw = (sa + math.pi) % (2 * math.pi) if self.park_var.get() == "FRONT" else sa
err_yaw = (target_yaw - self.ra + math.pi) % (2 * math.pi) - math.pi
if abs(err_yaw) < ANGLE_TOL:
# 회전 완료: 정지
self.stop_robot()
else:
# 비례 제어: 오차에 비례해서 회전 속도 조정
# 큰 오차 → 빠른 속도, 작은 오차 → 느린 속도
rot_speed = abs(err_yaw) * PARK_ALIGN_P_GAIN
rot_speed = max(PARK_ALIGN_MIN_SPEED, min(PARK_ALIGN_MAX_SPEED, rot_speed))
self.send_cmd(0, rot_speed if err_yaw > 0 else -rot_speed)
# ================= 탐색 패턴 & 유틸 =================
def start_search(self):
pattern = self.search_pattern.get()
if pattern not in VALID_PATTERNS:
messagebox.showwarning("탐색 모드", "나선형, 원형, 사각형, 하트 중 패턴을 선택해 주세요.")
return False
cx, cy = (self.waypoints[-1] if self.waypoints else (self.rx, self.ry))
pts = []
if pattern == "나선형":
for i in range(SEARCH_POINTS):
t = i / SEARCH_POINTS
pts.append((
cx + SEARCH_RADIUS * t * math.cos(t * 8 * math.pi),
cy + SEARCH_RADIUS * t * math.sin(t * 8 * math.pi),
))
elif pattern == "원형":
for i in range(SEARCH_CIRCLE_POINTS):
th = 2 * math.pi * i / SEARCH_CIRCLE_POINTS
pts.append((cx + SEARCH_RADIUS * math.cos(th), cy + SEARCH_RADIUS * math.sin(th)))
elif pattern == "사각형":
r = SEARCH_SQUARE_RADIUS
for y in (-r, 0, r):
pts.append((cx - r, cy + y))
pts.append((cx + r, cy + y))
elif pattern == "하트":
for i in range(SEARCH_POINTS):
t = 2 * math.pi * i / SEARCH_POINTS
x = 16 * math.sin(t) ** 3
y = 13 * math.cos(t) - 5 * math.cos(2 * t) - 2 * math.cos(3 * t) - math.cos(4 * t)
pts.append((cx + x * 2, cy + y * 2))
self.search_waypoints = pts
# 탐색 시각화
# 먼저 탐색 경로 확정
self.search_waypoints = pts
# 그 다음 시각화 창 생성
if self.search_window is None:
self.search_window = SearchMapWindow(self, self.search_waypoints)
self.mode = "SEARCH"
self._arrival_count = 0
# ===== 탐색 진행률 초기화 =====
self.search_progress_start_dist = None
self.search_progress_fail_count = 0
# ================= 탐색 재시작 초기화 =================
self._search_path_started = False
if self.search_window:
self.search_window.robot_path.clear()
self.search_window.search_started = False
return True
def add_waypoint_click(self, event):
if len(self.waypoints) >= 5:
messagebox.showwarning("입력 제한", "웨이포인트는 최대 5개까지만 설정할 수 있습니다.")
return
cx, cy = CANVAS_SIZE // 2, CANVAS_SIZE // 2
dx, dy = (event.x - cx) / SCALE, (cy - event.y) / SCALE
d = math.hypot(dx, dy)
a = math.atan2(dy, dx) + self.ra - VISUAL_OFFSET
self.waypoints.append((self.rx + d * math.cos(a), self.ry + d * math.sin(a)))
def update_loop(self):
"""UI 전용 루프 (네트워크 없음, 메인 스레드 논블로킹)"""
if self.start_pose is not None:
self.lbl_start_pos.config(
text=(
f"Start: X: {self.start_pose[0] / 100:.2f}, Y: {self.start_pose[1] / 100:.2f}, "
f"A: {math.degrees(self.start_pose[2]):.1f}°"
)
)
self.lbl_current_pos.config(
text=(
f"Current: X: {self.rx / 100:.2f}, Y: {self.ry / 100:.2f}, "
f"A: {math.degrees(self.ra):.1f}°"
)
)
self.lbl_state.config(text=f"상태: {self.mode}")
self.draw_canvas()
# 로그: 로봇이 작동 중일 때만 주기적으로 찍음, IDLE 전환 시 1회만 찍음
is_active = self.mode != "IDLE"
mode_changed = self.mode != self._last_mode
if mode_changed and self.mode == "IDLE" and self.stop_reason:
self.update_log()
self.stop_reason = None
if mode_changed:
self._last_log_time = time.time()
self.update_log() # 상태 변화 시 즉시 1회 로그
elif is_active and time.time() - self._last_log_time >= self._log_interval_sec:
self._last_log_time = time.time()
self.update_log() # 활동 중일 때만 주기적 로그
self._last_mode = self.mode
self.after(INTERVAL, self.update_loop)
# 탐색 시각화
if self.search_window:
try:
self.search_window.draw_lidar_obstacle(
self.rx, self.ry, self.ra, self.lidar_data
)
except tk.TclError:
self.search_window = None
# 탐색 GUI에 로봇 위치 / 경로 갱신
if self.search_window and self.mode == "SEARCH":
try:
self.search_window.update_robot(
self.rx, self.ry, self.ra
)
except tk.TclError:
self.search_window = None
def draw_canvas(self):
self.canvas.delete("all")
cx, cy = CANVAS_SIZE // 2, CANVAS_SIZE // 2
def to_canvas(wx, wy):
dx, dy = wx - self.rx, wy - self.ry
d = math.hypot(dx, dy)
a = math.atan2(dy, dx) - self.ra + VISUAL_OFFSET
return cx + d * math.cos(a) * SCALE, cy - d * math.sin(a) * SCALE
# 그리드
grid_step = int(GRID_CM * SCALE)
for i in range(0, CANVAS_SIZE, grid_step):
self.canvas.create_line(i, 0, i, CANVAS_SIZE, fill=GRID_COLOR)
self.canvas.create_line(0, i, CANVAS_SIZE, i, fill=GRID_COLOR)
# LIDAR (cos/sin 한 번만 계산)
for i in range(0, len(self.lidar_data), LIDAR_SKIP):
d = self.lidar_data[i] / DIST_DIV
if MIN_DIST < d < MAX_DIST:
ang = math.radians(i) + VISUAL_OFFSET
px = cx + d * LIDAR_SCALE_CM * math.cos(ang) * SCALE
py = cy - d * LIDAR_SCALE_CM * math.sin(ang) * SCALE
self.canvas.create_rectangle(px, py, px + 2, py + 2, fill=WALL_COLOR, outline="")
# 경로 흔적 (포인트 많을 때 샘플링으로 렌더링 부하 감소)
if len(self.path_history) > 1:
hist = list(self.path_history)
if len(hist) > 150:
hist = hist[::PATH_DISPLAY_STEP]
flat_pts = [c for pt in hist for c in to_canvas(pt[0], pt[1])]
if len(flat_pts) >= 4:
self.canvas.create_line(flat_pts, fill=PATH_COLOR, width=2)
# 웨이포인트
prev = (cx, cy)
for wx, wy in self.waypoints:
sx, sy = to_canvas(wx, wy)
self.canvas.create_line(prev[0], prev[1], sx, sy, fill=WAYPOINT_COLOR, dash=(4, 2))
self.canvas.create_oval(sx - 4, sy - 4, sx + 4, sy + 4, fill=WAYPOINT_COLOR, outline="white")
prev = (sx, sy)
# 탐색 경로
if self.search_waypoints:
s_pts = [c for pt in self.search_waypoints for c in to_canvas(pt[0], pt[1])]
if len(s_pts) >= 4:
self.canvas.create_line(s_pts, fill=SEARCH_COLOR, width=1, dash=(2, 2))
# 로봇
self.canvas.create_oval(cx - 12, cy - 12, cx + 12, cy + 12, fill="blue", width=2)
self.canvas.create_line(cx, cy, cx, cy - 25, fill="red", arrow=tk.LAST, width=3)
def start_waypoints(self):
self.mode = "WAYPOINT" if self.waypoints else "IDLE"
self._arrival_count = 0
def start_return(self):
self.return_phase = "MOVE"
self.mode = "RETURN"
self._arrival_count = 0
def stop_robot(self):
self.mode = "IDLE"
self.send_cmd(0, 0)
def clear_waypoints(self):
self.waypoints.clear()
self.search_waypoints.clear()
self.path_history.clear()
def optimize_path(self):
"""동적 프로그래밍으로 최적 경로 계산 (TSP 문제 해결)"""
if len(self.waypoints) < 2:
return
points = [(self.rx, self.ry)] + self.waypoints
n = len(points)
if n <= 2:
return
# 거리 함수
def dist(i, j):
return math.hypot(points[i][0] - points[j][0], points[i][1] - points[j][1])
# 모든 점 간 거리 행렬
dist_matrix = [[dist(i, j) for j in range(n)] for i in range(n)]
# DP[mask][i] = 방문한 점들(비트마스크), 현재 위치 i일 때의 최단거리
INF = float('inf')
dp = [[INF] * n for _ in range(1 << n)]
parent = [[-1] * n for _ in range(1 << n)]
# 시작점(0)에서 시작
dp[1][0] = 0
# 모든 부분집합 상태 순회
for mask in range(1 << n):
for u in range(n):
if dp[mask][u] == INF or not ((mask >> u) & 1):
continue
# u에서 방문하지 않은 다음 점으로
for v in range(n):
if (mask >> v) & 1: # 이미 방문
continue
new_mask = mask | (1 << v)
new_dist = dp[mask][u] + dist_matrix[u][v]
if new_dist < dp[new_mask][v]:
dp[new_mask][v] = new_dist
parent[new_mask][v] = u
# 모든 점 방문한 최종 상태에서 가장 가까운 점
full_mask = (1 << n) - 1
last = min(range(1, n), key=lambda i: dp[full_mask][i])
# 경로 역추적
path = []
mask = full_mask
curr = last
while curr != 0:
path.append(curr)
prev = parent[mask][curr]
mask ^= (1 << curr)
curr = prev
path.reverse()
# 웨이포인트만 추출
self.waypoints = [points[i] for i in path]
def send_cmd(self, lin, ang):
try:
requests.get(URL, params={"lin": f"{lin:.3f}", "ang": f"{ang:.3f}"}, timeout=0.1)
except requests.RequestException:
pass
# ___________________________________________________탐색 시각화___________________________________________________
class SearchMapWindow:
"""
탐색 전용 확대 지도 창
- world-fixed view
- 탐색 경로 전체 표시
- 장애물(LIDAR) 누적 표시
"""
def __init__(self, parent, search_waypoints):
self.win = tk.Toplevel(parent)
self.win.title("Search Map View")
self.win.geometry("700x700")
self.canvas_size = 650
self.canvas = tk.Canvas(
self.win, width=self.canvas_size, height=self.canvas_size, bg="white"
)
self.canvas.pack(expand=True, fill="both")
# 탐색 경로 고정 저장
self.search_waypoints = list(search_waypoints)
# 스케일 계산 (탐색 도형 전체가 보이도록)
xs = [p[0] for p in self.search_waypoints]
ys = [p[1] for p in self.search_waypoints]
self.min_x, self.max_x = min(xs), max(xs)
self.min_y, self.max_y = min(ys), max(ys)
span = max(self.max_x - self.min_x, self.max_y - self.min_y)
self.scale = (self.canvas_size * 0.8) / max(span, 1)
self.origin_x = self.canvas_size / 2
self.origin_y = self.canvas_size / 2
self.draw_search_path()
# 탐색 GUI에서 로봇 이동 경로 저장
self.robot_path = []
self.search_started = False
def world_to_canvas(self, x, y):
cx = self.origin_x + (x - (self.min_x + self.max_x) / 2) * self.scale
cy = self.origin_y - (y - (self.min_y + self.max_y) / 2) * self.scale
return cx, cy
def draw_search_path(self):
pts = []
for x, y in self.search_waypoints:
pts.extend(self.world_to_canvas(x, y))
if len(pts) >= 4:
self.canvas.create_line(
pts, fill=SEARCH_COLOR, width=2, dash=(3, 2)
)
def draw_lidar_obstacle(self, rx, ry, ra, lidar_data):
for i in range(0, len(lidar_data), LIDAR_SKIP):
d = lidar_data[i] / DIST_DIV
if MIN_DIST < d < MAX_DIST:
ang = math.radians(i)
wx = rx + d * 100 * math.cos(ang + ra)
wy = ry + d * 100 * math.sin(ang + ra)
cx, cy = self.world_to_canvas(wx, wy)
self.canvas.create_rectangle(
cx, cy, cx + 2, cy + 2,
fill=WALL_COLOR, outline=""
)
# ================= 로봇 시각화 (탐색 GUI 전용) =================
def update_robot(self, rx, ry, ra):
"""
탐색 GUI에서 로봇 위치 및 경로 갱신
"""
if not self.search_started:
return # 탐색 시작 전에는 기록하지 않음
self.robot_path.append((rx, ry))
self.draw_robot_path()
self.draw_robot(rx, ry, ra)
def draw_robot_path(self):
"""
지나간 로봇 경로 (노란색)
"""
if len(self.robot_path) < 2:
return
pts = []
for x, y in self.robot_path:
pts.extend(self.world_to_canvas(x, y))
if len(pts) >= 4:
self.canvas.create_line(
pts,
fill=PATH_COLOR,
width=2
)
if __name__ == "__main__":
root = tk.Tk()
root.title("Integrated Robot Controller - Request Updated")
RobotController(root).pack(expand=True, fill="both")
root.mainloop()-- CREATE TABLE log (
-- id BIGINT AUTO_INCREMENT PRIMARY KEY,
-- ts DATETIME DEFAULT CURRENT_TIMESTAMP,
-- source VARCHAR(50), -- draw3.0.py, controller 등
-- level VARCHAR(10), -- INFO, WARN, ERROR
-- message TEXT, -- tkinter에 찍히는 로그 그대로
-- rx FLOAT NULL,
-- ry FLOAT NULL,
-- theta FLOAT NULL
-- );
-- ALTER TABLE log
-- ADD COLUMN state VARCHAR(32) NULL,
-- ADD COLUMN pos_x FLOAT NULL,
-- ADD COLUMN pos_y FLOAT NULL,
-- ADD COLUMN obstacle BOOLEAN NULL,
-- ADD COLUMN obstacle_desc VARCHAR(255) NULL,
-- ADD COLUMN front_type VARCHAR(16) NULL;
-- 구조 확인
-- SHOW TABLES;
-- DESC log;
-- 전체 로그
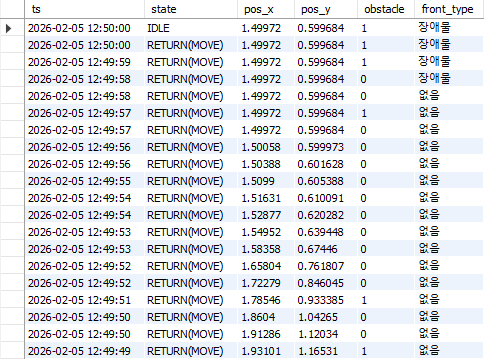
SELECT ts, state, pos_x, pos_y, obstacle, front_type
FROM log
ORDER BY id DESC
LIMIT 20;
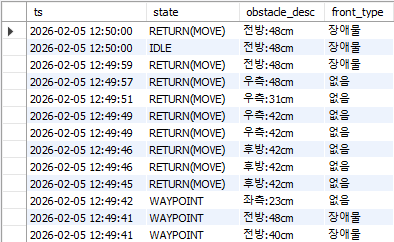
-- 장애물 로그
SELECT ts, state, obstacle_desc, front_type
FROM log
WHERE obstacle = 1
ORDER BY ts DESC;
-- RETURN 중 장애물
SELECT *
FROM log
WHERE state LIKE 'RETURN%'
AND obstacle = 1
ORDER BY ts DESC;

main + sql 수정
sql 실시간(과거 10분까지 반영)
main(파일 이름 변경해도 sql에서 문제 없도록 수정)
import math
import tkinter as tk
from tkinter import ttk, messagebox, scrolledtext
from collections import deque
from datetime import datetime
import requests
import threading
import time
import mysql.connector
import os
SOURCE_NAME = os.path.splitext(os.path.basename(__file__))[0]
db_conn = mysql.connector.connect(
host="192.168.0.187",
port=3306,
user="root",
password="0000",
database="group1",
autocommit=True
)
db_cursor = db_conn.cursor()
# ================= 설정 및 파라미터 =================
URL = "http://127.0.0.1:9010/control"
# URL = "http://192.168.0.243:9088/control"
INTERVAL = 80 # UI 갱신 주기 (메인 스레드, 렉 방지)
FETCH_INTERVAL = 0.05 # API 폴링 주기 (백그라운드)
PATH_HISTORY_MAX = 600
CANVAS_SIZE = 600
SCALE = 1.5 # cm → px
# 도달 판정 범위 (cm)
WP_TOL = 1.0 # 도착 판정 반경 (웨이포인트/탐색)
PARK_TOL = 1.0 # 주차(복귀) 위치 오차 허용 반경 (10cm)
WP_ARRIVAL_CONSEC = 2 # 연속 N회 내에 있어야 도착 인정
ANGLE_TOL = math.radians(0.5) # 주차 시 회전 완료 판정각 (±2도)
ANGLE_ARRIVAL_CONSEC = 2 # 주차 각도 연속 도착 인정 횟수
# 주차 정렬(회전) 비례 제어 파라미터
PARK_ALIGN_P_GAIN = 0.8 # 비례 제어 gain (오차에 비례한 속도)
PARK_ALIGN_MAX_SPEED = 0.2 # 최대 회전 속도 (큰 오차시)
PARK_ALIGN_MIN_SPEED = 0.1 # 최소 회전 속도 (정지 직전)
# smart_move 제어 파라미터
SLOW_DIST_CM = 15.0 # 이 거리 이하에서 1차 감속
NEAR_DIST_CM = 8.0 # 이 거리 이하에서 2차 강감속
MIN_LIN_SPEED = 0.05 # 중간 구간 최소 속도
MIN_LIN_SPEED_NEAR = 0.02 # 근접 구간 최소 속도 (오버슈트 방지)
ROT_THRESHOLD = 0.52 # 이 각도 이상이면 제자리 회전만 함 (약 30도) - 먼저 회전 후 직진
ANG_GAIN = 1.8 # 각도 보정 gain
ALIGN_SLOW_THRESHOLD = 0.2 # 복귀 정렬 시 저속 회전 전환각 (rad)
ALIGN_SLOW_FACTOR = 0.3 # 저속 회전 배율 (더 정확한 정렬)
# 탐색(Search) 설정
SEARCH_RADIUS = 40.0
SEARCH_SQUARE_RADIUS = 25.0 # 사각형 패턴 반경
SEARCH_POINTS = 60
SEARCH_CIRCLE_POINTS = 30
# LIDAR 시각화 설정
DIST_DIV = 100.0
MIN_DIST = 0.10
MAX_DIST = 3.5
LIDAR_SKIP = 2 # LIDAR 표시 간격 (전체 표시)
PATH_DISPLAY_STEP = 2 # 경로 흔적 표시 시 2칸마다 1점 (600→300점)
LIDAR_SCALE_CM = 100 # LIDAR m → cm (DIST_DIV 적용 후)
GRID_CM = 20
GRID_COLOR = "#dddddd"
WALL_COLOR = "#7a00cc"
PATH_COLOR = "#ffcc00"
WAYPOINT_COLOR = "#007bff"
SEARCH_COLOR = "#9c27b0"
VISUAL_OFFSET = math.pi / 2
# 폰트 설정
FONT_MAIN = ("Segoe UI", 9)
FONT_BOLD = ("Segoe UI", 9, "bold")
# 유효한 탐색 패턴
VALID_PATTERNS = frozenset({"나선형", "원형", "사각형", "하트"})
# 장애물 판정 (cm 이하면 장애물로 인식)
OBSTACLE_THRESHOLD_CM = 30.0
FRONT_OBSTACLE_DISTANCE = 30.0 # 전방 장애물 감지 거리 (cm)
FRONT_OBSTACLE_COUNT = 5 # 장애물로 판정할 최소 LIDAR 포인트 수
# 회피 동작 파라미터
AVOIDANCE_MIN_FORWARD_CM = 30.0 # 회피 후 최소 전진 거리 (cm)
# 벽/장애물 분류 파라미터
CLUSTER_DIST_JUMP_CM = 20.0 # 클러스터 분리 거리 차이 기준
WALL_MIN_LENGTH_CM = 80.0 # 벽으로 보는 최소 길이
WALL_MAX_MEAN_RESID_CM = 5.0 # 직선 적합 평균 잔차
WALL_MIN_POINTS = 6 # 벽 판단 최소 포인트 수
class RobotController(ttk.Frame):
def __init__(self, master):
super().__init__(master)
# [개발자 설정] 내부 속도 변수
self.cfg_lin_speed = 0.25
self.cfg_ang_speed = 0.6
self.rx = self.ry = self.ra = 0.0
self.start_pose = None
self.mode = "IDLE"
self.return_phase = None
# 장애물 회피 관련 변수
self.in_avoidance = False # 회피 중 여부
self.avoidance_forward_distance = 0.0 # 회피 중 전진한 거리
self.avoidance_target_waypoint = None # 회피 전 목표 waypoint
self.last_waypoint_distance = 0.0 # 회피 시작 시 waypoint까지의 거리
self.avoidance_has_rotated = False # 회피 시작 시 회전 완료 여부
self.lidar_data = []
self.waypoints = []
self.search_waypoints = []
self.path_history = deque(maxlen=PATH_HISTORY_MAX) # O(1) append, 자동 크기 제한
self.search_pattern = tk.StringVar(value="--선택--")
self.auto_search = tk.BooleanVar(value=False)
self.log_entries = deque(maxlen=100)
self._last_log_time = 0
self._log_interval_sec = 0.5
self._arrival_count = 0 # 도착 연속 카운트 (스쳐지나감 방지)
self._last_mode = "IDLE" # 상태 변화 감지용
# 탐색 시각화
self.search_window = None
self._search_path_started = False
self.setup_ui()
threading.Thread(target=self.fetch_loop, daemon=True).start()
threading.Thread(target=self.control_loop, daemon=True).start()
self.update_loop()
# ================= UI 구성 =================
def setup_ui(self):
panel = tk.Frame(self, width=260, padx=10, pady=10)
panel.pack(side="left", fill="y")
tk.Label(panel, text="[ 위치 정보 ]", font=FONT_BOLD).pack(anchor="w")
self.lbl_start_pos = tk.Label(panel, text="Start: X: 0.00, Y: 0.00, A: 0.0°", fg="#666666", font=FONT_MAIN)
self.lbl_start_pos.pack(anchor="w", pady=(5, 0))
self.lbl_current_pos = tk.Label(panel, text="Current: X: 0.00, Y: 0.00, A: 0.0°",
font=FONT_BOLD, fg="#007bff")
self.lbl_current_pos.pack(anchor="w", pady=(0, 5))
self.lbl_state = tk.Label(panel, text="상태: IDLE", font=FONT_MAIN)
self.lbl_state.pack(anchor="w", pady=5)
ttk.Separator(panel, orient="horizontal").pack(fill="x", pady=8)
# 1. 일반 주행 제어
tk.Label(panel, text="[ 기본 주행 ]", font=FONT_BOLD).pack(anchor="w")
tk.Button(panel, text="포인트 따라가기", command=self.start_waypoints, font=FONT_MAIN).pack(fill="x", pady=2)
tk.Button(panel, text="최단 경로 설정", command=self.optimize_path, font=FONT_MAIN).pack(fill="x", pady=2)
tk.Button(panel, text="경로 초기화", command=self.clear_waypoints, font=FONT_MAIN).pack(fill="x", pady=2)
ttk.Separator(panel, orient="horizontal").pack(fill="x", pady=8)
# 2. 탐색(Search) 제어
tk.Label(panel, text="[ 탐색 모드 ]", font=FONT_BOLD).pack(anchor="w")
pat_combo = ttk.Combobox(panel, textvariable=self.search_pattern,
values=["나선형", "원형", "사각형", "하트"], state="readonly", font=FONT_MAIN)
pat_combo.pack(fill="x", pady=2)
tk.Checkbutton(panel, text="주행 후 자동 탐색", variable=self.auto_search, font=FONT_MAIN).pack(anchor="w")
tk.Button(panel, text="탐색 시작", command=self.start_search, font=FONT_MAIN).pack(fill="x", pady=4)
ttk.Separator(panel, orient="horizontal").pack(fill="x", pady=8)
# 3. 복귀 및 정지
tk.Label(panel, text="[ 복귀 설정 ]", font=FONT_BOLD).pack(anchor="w")
pf = tk.Frame(panel)
pf.pack(anchor="w")
self.park_var = tk.StringVar(value="BACK")
tk.Radiobutton(pf, text="전면주차", variable=self.park_var, value="FRONT", font=FONT_MAIN).pack(side="left")
tk.Radiobutton(pf, text="후면주차", variable=self.park_var, value="BACK", font=FONT_MAIN).pack(side="left")
tk.Button(panel, text="복귀하기", command=self.start_return, font=FONT_MAIN).pack(fill="x", pady=5)
tk.Button(panel, text="정지", command=self.stop_robot,
fg="white", bg="#d32f2f", font=FONT_BOLD).pack(fill="x", pady=15)
ttk.Separator(panel, orient="horizontal").pack(fill="x", pady=8)
self.btn_log_toggle = tk.Button(panel, text="📋 로그 열기", command=self.toggle_log,
font=("Segoe UI", 11, "bold"),
fg="white", bg="#2196F3",
padx=12, pady=10, cursor="hand2", relief=tk.RAISED, bd=2)
self.btn_log_toggle.pack(fill="x", pady=8)
# 중앙: 캔버스 + (접을 수 있는) 로그 패널
self.content_frame = tk.Frame(self)
self.content_frame.pack(side="right", expand=True, fill="both")
self.canvas = tk.Canvas(self.content_frame, width=CANVAS_SIZE, height=CANVAS_SIZE, bg="white")
self.canvas.pack(side="left", expand=True, fill="both")
self.canvas.bind("<Button-1>", self.add_waypoint_click)
# 로그 패널 (우측, 기본 숨김)
self.log_frame = tk.Frame(self.content_frame, width=360, bg="white", relief=tk.GROOVE, bd=1)
self.log_frame.pack_propagate(False)
self._log_visible = False
log_header = tk.Frame(self.log_frame, bg="white", pady=6)
log_header.pack(fill="x", padx=8)
tk.Label(log_header, text="[ 로봇 상태 로그 ]", font=FONT_BOLD, fg="#333", bg="white").pack(side="left")
tk.Button(log_header, text="접기", command=self.toggle_log, font=FONT_MAIN,
fg="#666", relief=tk.FLAT, cursor="hand2").pack(side="right")
self.log_text = scrolledtext.ScrolledText(
self.log_frame, wrap=tk.WORD, font=("Consolas", 9),
bg="white", fg="#333", insertbackground="#333",
relief=tk.FLAT, padx=8, pady=4
)
self.log_text.pack(expand=True, fill="both")
def toggle_log(self):
"""로그 패널 열기/접기"""
if self._log_visible:
self.log_frame.pack_forget()
self.btn_log_toggle.config(text="📋 로그 열기", bg="#2196F3")
self._log_visible = False
else:
self.log_frame.pack(side="right", fill="y")
self.btn_log_toggle.config(text="📋 로그 접기", bg="#1976D2")
self._log_visible = True
def get_obstacle_info(self):
"""LIDAR에서 장애물 방향·거리 분석. 반환: (감지여부, [(방향, 거리_cm), ...])"""
if not self.lidar_data or len(self.lidar_data) < 360:
return False, []
def get_dist_cm(deg):
idx = deg % 360
raw = self.lidar_data[idx]
if raw <= 0:
return float("inf")
d_m = raw / DIST_DIV
return d_m * 100 # m → cm
# 전방(-20~20), 좌(70~90), 우(270~290), 후방(160~200)
front = min(get_dist_cm(d) for d in range(-20, 21))
left = min(get_dist_cm(d) for d in range(70, 91))
right = min(get_dist_cm(d) for d in range(270, 291))
back = min(get_dist_cm(d) for d in range(160, 201))
obstacles = []
if front < OBSTACLE_THRESHOLD_CM:
obstacles.append(("전방", front))
if left < OBSTACLE_THRESHOLD_CM:
obstacles.append(("좌측", left))
if right < OBSTACLE_THRESHOLD_CM:
obstacles.append(("우측", right))
if back < OBSTACLE_THRESHOLD_CM:
obstacles.append(("후방", back))
return len(obstacles) > 0, obstacles
def check_front_obstacle(self):
"""전방 장애물 감지: 전방 각도 범위에서 기준 거리 이내 포인트 수"""
dists = self.get_lidar_dist_cm_list()
if not dists:
return False
# 전방 범위: 0~44도, 315~359도
front_angles = list(range(0, 45)) + list(range(315, 360))
obstacle_count = 0
for angle in front_angles:
if dists[angle] <= FRONT_OBSTACLE_DISTANCE:
obstacle_count += 1
return obstacle_count >= FRONT_OBSTACLE_COUNT
def get_front_obstacle_distance(self):
"""전방 장애물 최소 거리(cm). 감지 없으면 inf 반환"""
dists = self.get_lidar_dist_cm_list()
if not dists:
return float("inf")
front_angles = list(range(0, 45)) + list(range(315, 360))
front_dists = [dists[a] for a in front_angles if math.isfinite(dists[a])]
if not front_dists:
return float("inf")
return min(front_dists)
def detect_front_obstacle_type(self):
"""
전방 30cm 범위의 장애물 타입 감지
반환: ("wall" | "obstacle" | None, 감지된 개수)
"""
dists = self.get_lidar_dist_cm_list()
if not dists:
return None, 0
types = self.classify_lidar_points(dists)
# 전방 범위: 0~44도, 315~359도
front_angles = list(range(0, 45)) + list(range(315, 360))
wall_count = 0
obstacle_count = 0
for angle in front_angles:
if dists[angle] <= FRONT_OBSTACLE_DISTANCE:
if types[angle] == "wall":
wall_count += 1
elif types[angle] == "obstacle":
obstacle_count += 1
# 어느 것이 더 많은지 판단
if wall_count + obstacle_count < FRONT_OBSTACLE_COUNT:
return None, 0
if wall_count > obstacle_count:
return "wall", wall_count
else:
return "obstacle", obstacle_count
def get_best_turn_direction(self):
"""
현재 방향 기준 좌우 중 더 비어있는 방향 판단
- 더 먼 평균 거리
- 장애물로 잡히는 포인트가 적은 쪽
반환: ("left" | "right", 좌측거리, 우측거리, 좌측카운트, 우측카운트)
"""
dists = self.get_lidar_dist_cm_list()
if not dists:
return None, 0, 0, 0, 0
# 현재 방향 기준 좌우 스캔 범위 (더 넓은 범위)
# 좌측: 20~160도, 우측: 200~340도
left_angles = list(range(20, 161))
right_angles = list(range(200, 341))
left_dists = [dists[a] for a in left_angles if math.isfinite(dists[a])]
right_dists = [dists[a] for a in right_angles if math.isfinite(dists[a])]
left_avg = sum(left_dists) / len(left_dists) if left_dists else 0
right_avg = sum(right_dists) / len(right_dists) if right_dists else 0
left_count = sum(1 for a in left_angles if dists[a] <= FRONT_OBSTACLE_DISTANCE)
right_count = sum(1 for a in right_angles if dists[a] <= FRONT_OBSTACLE_DISTANCE)
# 점수: 평균거리 우선 + 장애물 포인트 수가 적은 쪽 우선
# (동점이면 평균거리가 큰 쪽)
if left_count < right_count:
return "left", left_avg, right_avg, left_count, right_count
if right_count < left_count:
return "right", left_avg, right_avg, left_count, right_count
if left_avg >= right_avg:
return "left", left_avg, right_avg, left_count, right_count
return "right", left_avg, right_avg, left_count, right_count
def rotate_90_degrees(self, direction):
"""
90도 회전 (방향: "left" 또는 "right")
direction: "left" → 반시계방향 90도 회전
"right" → 시계방향 90도 회전
"""
target_angle = self.ra + (math.pi / 2 if direction == "left" else -math.pi / 2)
print(
f"[회전 시작] 방향: {direction} (90도) | 현재: {math.degrees(self.ra):.1f}° → 목표: {math.degrees(target_angle):.1f}°")
# 90도 회전 완료될 때까지 회전
rotate_start_time = time.time()
while time.time() - rotate_start_time < 5.0: # 최대 5초
err = (target_angle - self.ra + math.pi) % (2 * math.pi) - math.pi
if abs(err) < math.radians(2): # ±2도 이내
self.send_cmd(0, 0)
print(f"[회전 완료] {math.degrees(self.ra):.1f}°")
break
# 회전 명령
ang_cmd = 0.5 if err > 0 else -0.5 # 회전 속도 0.5 rad/s
self.send_cmd(0, ang_cmd)
time.sleep(0.05)
def rotate_to_angle(self, target_angle):
"""목표 절대 각도(target_angle)로 회전"""
target_angle = target_angle % (2 * math.pi)
rotate_start_time = time.time()
while time.time() - rotate_start_time < 5.0: # 최대 5초
err = (target_angle - self.ra + math.pi) % (2 * math.pi) - math.pi
if abs(err) < math.radians(2):
self.send_cmd(0, 0)
break
ang_cmd = 0.5 if err > 0 else -0.5
self.send_cmd(0, ang_cmd)
time.sleep(0.05)
def get_front_wall_parallel_angle(self):
"""전방 벽과 평행한 방향(절대 각도) 계산. 실패 시 None"""
dists = self.get_lidar_dist_cm_list()
if not dists:
return None
types = self.classify_lidar_points(dists)
front_angles = list(range(0, 45)) + list(range(315, 360))
wall_points = []
for angle_deg in front_angles:
if types[angle_deg] == "wall" and dists[angle_deg] < 100:
r = dists[angle_deg]
theta = math.radians(angle_deg)
x = r * math.cos(theta)
y = r * math.sin(theta)
wall_points.append((x, y))
if len(wall_points) < 3:
return None
xs = [p[0] for p in wall_points]
ys = [p[1] for p in wall_points]
mx = sum(xs) / len(xs)
my = sum(ys) / len(ys)
numerator = sum((xs[i] - mx) * (ys[i] - my) for i in range(len(xs)))
denominator = sum((xs[i] - mx) ** 2 for i in range(len(xs)))
if abs(denominator) < 1e-6:
wall_angle = math.pi / 2
else:
slope = numerator / denominator
wall_angle = math.atan(slope)
return (self.ra + wall_angle) % (2 * math.pi)
def can_reach_waypoint_directly(self, target_x, target_y):
"""
현재 위치에서 목표 waypoint까지 직진할 수 있는지 확인
(목표 방향 범위 내에 장애물이 없는지 체크)
반환: True = 장애물 없음, False = 장애물 있음
"""
dists = self.get_lidar_dist_cm_list()
if not dists:
return True
# 목표 방향 계산
target_angle = math.atan2(target_y - self.ry, target_x - self.rx)
relative_angle = (target_angle - self.ra + math.pi) % (2 * math.pi) - math.pi
target_deg = int(math.degrees(relative_angle)) % 360
# 목표 방향 ±30도 범위 내 장애물 확인
check_angles = [(target_deg + offset) % 360 for offset in range(-30, 31)]
obstacle_count = 0
for angle in check_angles:
if dists[angle] <= FRONT_OBSTACLE_DISTANCE:
obstacle_count += 1
# 충분한 포인트 수 이상 장애물이 있으면 막혀있음
return obstacle_count < FRONT_OBSTACLE_COUNT
def get_lidar_dist_cm_list(self):
if not self.lidar_data or len(self.lidar_data) < 360:
return None
dists = []
for i in range(360):
raw = self.lidar_data[i]
if raw <= 0:
dists.append(float("inf"))
else:
dists.append((raw / DIST_DIV) * 100)
return dists
def classify_lidar_points(self, dists):
"""클러스터링 후 벽/장애물 분류. 반환: 각도 인덱스별 타입"""
types = [None] * 360
# 클러스터 분리
clusters = []
current = []
prev_dist = None
for deg in range(360):
dist = dists[deg]
if not math.isfinite(dist):
if current:
clusters.append(current)
current = []
prev_dist = None
continue
if not current:
current = [deg]
else:
if prev_dist is not None and abs(dist - prev_dist) > CLUSTER_DIST_JUMP_CM:
clusters.append(current)
current = [deg]
else:
current.append(deg)
prev_dist = dist
if current:
clusters.append(current)
# 클러스터 분류
for cluster in clusters:
if len(cluster) < WALL_MIN_POINTS:
ctype = "obstacle"
else:
pts = []
for deg in cluster:
r = dists[deg]
th = math.radians(deg)
pts.append((r * math.cos(th), r * math.sin(th)))
# 길이 추정
x0, y0 = pts[0]
x1, y1 = pts[-1]
length = math.hypot(x1 - x0, y1 - y0)
# PCA로 직선성 평가
mx = sum(p[0] for p in pts) / len(pts)
my = sum(p[1] for p in pts) / len(pts)
sxx = sum((p[0] - mx) ** 2 for p in pts) / len(pts)
syy = sum((p[1] - my) ** 2 for p in pts) / len(pts)
sxy = sum((p[0] - mx) * (p[1] - my) for p in pts) / len(pts)
trace = sxx + syy
det = sxx * syy - sxy * sxy
temp = max(0.0, (trace / 2) ** 2 - det)
lambda2 = trace / 2 - math.sqrt(temp)
mean_resid = math.sqrt(max(0.0, lambda2))
if length >= WALL_MIN_LENGTH_CM and mean_resid <= WALL_MAX_MEAN_RESID_CM:
ctype = "wall"
else:
ctype = "obstacle"
for deg in cluster:
types[deg] = ctype
# None은 장애물로 취급
for i in range(360):
if types[i] is None:
types[i] = "obstacle"
return types
def format_log_line(self):
"""현재 상태를 로그 한 줄로 포맷"""
now = datetime.now().strftime("%Y-%m-%d %H:%M:%S")
pos = f"X: {self.rx / 100:.2f}m, Y: {self.ry / 100:.2f}m"
state = self.mode
if self.mode == "RETURN" and self.return_phase:
state = f"{self.mode}({self.return_phase})"
detected, obstacles = self.get_obstacle_info()
if detected:
obs_str = " | ".join(f"{d}: {r:.0f}cm" for d, r in obstacles)
obs_info = f"감지됨 [{obs_str}]"
else:
obs_info = "없음"
# 전방 감지 대상(벽/장애물) 로그 표시
front_type = "없음"
dists = self.get_lidar_dist_cm_list()
if dists:
types = self.classify_lidar_points(dists)
front_angles = list(range(0, 45)) + list(range(315, 360))
wall_count = 0
obs_count = 0
for a in front_angles:
if dists[a] <= FRONT_OBSTACLE_DISTANCE:
if types[a] == "wall":
wall_count += 1
else:
obs_count += 1
if wall_count or obs_count:
if wall_count > obs_count:
front_type = "벽"
elif obs_count > wall_count:
front_type = "장애물"
else:
front_type = "혼합"
return f"[{now}] Pos({pos}) | 상태: {state} | 장애물: {obs_info} | 전방: {front_type}\n"
def update_log(self):
"""로그 창에 새 줄 추가"""
try:
line = self.format_log_line()
self.log_text.insert(tk.END, line)
self.log_text.see(tk.END)
# 스크롤 영역 제한 (최근 500줄)
lines = self.log_text.get("1.0", tk.END).split("\n")
if len(lines) > 500:
self.log_text.delete("1.0", f"{len(lines) - 500}.0")
# DB 저장
state = self.mode
if self.mode == "RETURN" and self.return_phase:
state = f"{self.mode}({self.return_phase})"
pos_x = self.rx / 100.0
pos_y = self.ry / 100.0
detected, obstacles = self.get_obstacle_info()
obstacle_flag = bool(detected)
obstacle_desc = None
if detected and obstacles:
obstacle_desc = ", ".join(
f"{direction}:{int(dist)}cm" for direction, dist in obstacles
)
front_type = "없음"
dists = self.get_lidar_dist_cm_list()
if dists:
types = self.classify_lidar_points(dists)
front_angles = list(range(0, 45)) + list(range(315, 360))
wall_cnt = 0
obs_cnt = 0
for a in front_angles:
if dists[a] <= FRONT_OBSTACLE_DISTANCE:
if types[a] == "wall":
wall_cnt += 1
else:
obs_cnt += 1
if wall_cnt > obs_cnt:
front_type = "벽"
elif obs_cnt > wall_cnt:
front_type = "장애물"
elif wall_cnt or obs_cnt:
front_type = "혼합"
db_cursor.execute(
"""
INSERT INTO log (
source, level, message,
rx, ry, theta,
state, pos_x, pos_y,
obstacle, obstacle_desc, front_type
)
VALUES (%s, %s, %s, %s, %s, %s, %s, %s, %s, %s, %s, %s)
""",
(
SOURCE_NAME,
"INFO",
line.strip(),
self.rx,
self.ry,
self.ra,
state,
pos_x,
pos_y,
obstacle_flag,
obstacle_desc,
front_type,
)
)
except (tk.TclError, AttributeError):
pass
except Exception:
pass
def fetch_loop(self):
"""API 요청 전용 스레드 - 메인(GUI) 스레드 블로킹 방지"""
while True:
try:
res = requests.get(URL, timeout=0.1).json()
p = res["p"]
self.rx, self.ry, self.ra = p["x"] * 100, p["y"] * 100, float(p["a"])
# 각도 정규화 (0 ~ 2π 범위)
self.ra = self.ra % (2 * math.pi)
if self.start_pose is None:
self.start_pose = (self.rx, self.ry, self.ra)
self.path_history.append((self.rx, self.ry))
self.lidar_data = res.get("s", res.get("scan", []))
except (requests.RequestException, KeyError, ValueError, TypeError):
pass
time.sleep(FETCH_INTERVAL)
# ================= 핵심 제어 로직 =================
def control_loop(self):
while True:
# 회피 모드 중인지 확인
if self.in_avoidance:
# 장애물 회피 중: 먼저 벽과 평행하게 회전 후 직진
if not self.avoidance_has_rotated:
target_angle = self.get_front_wall_parallel_angle()
if target_angle is not None:
self.send_cmd(0, 0)
self.rotate_to_angle(target_angle)
else:
direction, left_dist, right_dist, left_count, right_count = self.get_best_turn_direction()
self.send_cmd(0, 0)
self.rotate_90_degrees(direction)
self.avoidance_has_rotated = True
# 회전 후 고정 거리만 전진
# 전진 중 다시 장애물이 나타나면 센서 갱신 후 재회전
if self.check_front_obstacle():
obstacle_type, count = self.detect_front_obstacle_type()
if obstacle_type:
print(f"[회피 중 재감지] {obstacle_type.upper()} ({count}포인트) → 재회전")
direction, left_dist, right_dist, left_count, right_count = self.get_best_turn_direction()
print(
f" 좌측: {left_dist:.1f}cm({left_count}), 우측: {right_dist:.1f}cm({right_count}) → {direction} 방향")
self.send_cmd(0, 0)
self.rotate_90_degrees(direction)
self.avoidance_has_rotated = True
else:
self.send_cmd(self.cfg_lin_speed, 0)
# cfg_lin_speed는 m/s, 거리 누적은 cm 단위
self.avoidance_forward_distance += self.cfg_lin_speed * 0.05 * 100
if self.avoidance_forward_distance >= AVOIDANCE_MIN_FORWARD_CM:
# 전진 완료 후 waypoint로 복귀
self.in_avoidance = False
self.avoidance_forward_distance = 0.0
self.avoidance_has_rotated = False
else:
# 회피 모드 아님: 일반 제어
if self.check_front_obstacle():
# 장애물/벽 감지 → 회피 모드 진입
obstacle_type, count = self.detect_front_obstacle_type()
if obstacle_type:
print(f"[장애물 감지] {obstacle_type.upper()} ({count}포인트) → 회피 시작")
self.send_cmd(0, 0)
# 장애물보다 앞에 있는 waypoint만 도착 처리
if self.mode == "WAYPOINT" and self.waypoints:
front_dist = self.get_front_obstacle_distance()
wp_dist = math.hypot(
self.waypoints[0][0] - self.rx,
self.waypoints[0][1] - self.ry
)
if wp_dist <= front_dist:
reached = self.waypoints.pop(0)
print(f"[웨이포인트 도착 처리] 장애물보다 앞이라 {reached} 도착으로 처리")
else:
print("[웨이포인트 유지] 장애물 뒤에 있어 삭제하지 않음")
# 다음 waypoint를 회피 종료 조건으로 사용
if self.waypoints:
self.avoidance_target_waypoint = self.waypoints[0]
self.last_waypoint_distance = math.hypot(
self.waypoints[0][0] - self.rx,
self.waypoints[0][1] - self.ry
)
else:
self.avoidance_target_waypoint = None
# 더 비어있는 방향 판단 및 회전
direction, left_dist, right_dist, left_count, right_count = self.get_best_turn_direction()
print(
f" 좌측: {left_dist:.1f}cm({left_count}), 우측: {right_dist:.1f}cm({right_count}) → {direction} 방향 회전")
# 회피 모드 진입 (회전은 회피 모드에서 수행)
self.in_avoidance = True
self.avoidance_forward_distance = 0.0
self.avoidance_has_rotated = False
else:
# 타입 미결정: 일단 멈춤
self.send_cmd(0, 0)
else:
# 장애물 없음: 모드별 제어 실행
if self.mode == "WAYPOINT":
self.step_waypoint()
elif self.mode == "SEARCH":
self.step_search()
elif self.mode == "RETURN":
self.step_return()
time.sleep(0.05)
def smart_move(self, tx, ty, dist_tol=WP_TOL, allow_in_place=True):
dist = math.hypot(tx - self.rx, ty - self.ry)
# 도착 판정:
# - 회피 모드: 30cm 범위 적용 (장애물 회피 후)
# - 일반 모드: dist_tol(5cm) 정확한 범위 적용
arrival_tol = FRONT_OBSTACLE_DISTANCE if self.in_avoidance else dist_tol
if dist < arrival_tol:
self._arrival_count += 1
if self._arrival_count >= WP_ARRIVAL_CONSEC:
self._arrival_count = 0
return True
else:
self._arrival_count = 0
ta = math.atan2(ty - self.ry, tx - self.rx)
err = (ta - self.ra + math.pi) % (2 * math.pi) - math.pi
limit_lin, limit_ang = self.cfg_lin_speed, self.cfg_ang_speed
# 2단계 감속: 15cm→8cm→근접 순으로 점진적 감속
if dist > SLOW_DIST_CM:
target_lin = limit_lin
elif dist > NEAR_DIST_CM:
target_lin = max(MIN_LIN_SPEED, limit_lin * (dist / SLOW_DIST_CM))
else:
target_lin = max(MIN_LIN_SPEED_NEAR, limit_lin * (dist / NEAR_DIST_CM) * 0.5)
if allow_in_place:
# ===== 개선된 제어 로직: 먼저 회전 정렬, 그다음 직진 =====
if abs(err) > 0.1: # 각도 오차가 있으면 제자리 회전만
rot_speed = limit_ang if abs(err) > 0.8 else limit_ang * 0.6
self.send_cmd(0, rot_speed if err > 0 else -rot_speed)
else: # 각도 정렬됨: 직진
self.send_cmd(target_lin, 0)
else:
# 웨이포인트는 좌표 도달 위주: 제자리 회전 없이 이동 중 보정
ang_cmd = max(-limit_ang, min(limit_ang, err * ANG_GAIN))
lin_cmd = target_lin * (0.5 if abs(err) > ROT_THRESHOLD else 1.0)
self.send_cmd(lin_cmd, ang_cmd)
return False
def step_waypoint(self):
if not self.waypoints:
if self.auto_search.get() and self.start_search():
pass # start_search가 SEARCH 모드로 전환
else:
self.stop_robot()
return
if self.smart_move(*self.waypoints[0], allow_in_place=True):
self.waypoints.pop(0)
self.send_cmd(0, 0)
time.sleep(0.1)
def step_search(self):
if not self.search_waypoints:
self.stop_robot()
return
if self.smart_move(*self.search_waypoints[0]):
self.search_waypoints.pop(0)
def step_return(self):
if not self.start_pose:
print("DEBUG: start_pose가 None")
return
sx, sy, sa = self.start_pose
print(f"DEBUG: return_phase = {self.return_phase}")
if self.return_phase == "MOVE":
dist = math.hypot(sx - self.rx, sy - self.ry)
print(
f"DEBUG: MOVE 단계 - 목표({sx / 100:.2f}, {sy / 100:.2f}) 현재({self.rx / 100:.2f}, {self.ry / 100:.2f}) 거리={dist:.2f}cm 허용={PARK_TOL:.4f}")
if self.smart_move(sx, sy, dist_tol=PARK_TOL):
print("DEBUG: MOVE 단계 도착! ALIGN으로 전환")
self.send_cmd(0, 0)
self.return_phase = "ALIGN"
self._align_arrival_count = 0
elif self.return_phase == "ALIGN":
# 목표 각도: 시작할 때의 각도
target_yaw = sa
# 각도 오차 계산 (최단 거리로 자동 계산)
err_yaw = (target_yaw - self.ra + math.pi) % (2 * math.pi) - math.pi
# 디버그 출력
print(
f"목표: {math.degrees(target_yaw):.1f}° | 현재: {math.degrees(self.ra):.1f}° | 오차: {math.degrees(err_yaw):.1f}° | 범위: {math.degrees(ANGLE_TOL):.1f}°")
if abs(err_yaw) < ANGLE_TOL:
# 오차 범위 내: 연속 카운트로 안정성 확보
self._align_arrival_count += 1
self.send_cmd(0, 0)
if self._align_arrival_count >= ANGLE_ARRIVAL_CONSEC:
self.stop_robot()
else:
self._align_arrival_count = 0
# 비례 제어: 오차에 비례한 회전 속도
rot_speed = abs(err_yaw) * PARK_ALIGN_P_GAIN
# 목표 각도에 가까워지면 느리게 회전
if abs(err_yaw) < ALIGN_SLOW_THRESHOLD:
rot_speed *= ALIGN_SLOW_FACTOR
# 회전 속도 제한
rot_speed = max(PARK_ALIGN_MIN_SPEED, min(PARK_ALIGN_MAX_SPEED, rot_speed))
# err_yaw > 0: 목표가 더 큼 (반시계 회전 필요)
# err_yaw < 0: 목표가 더 작음 (시계 회전 필요)
# 더 가까운 방향으로 자동 선택됨
print(f"회전 속도: {rot_speed:.3f} | 방향: {'반시계(+)' if err_yaw > 0 else '시계(-)'}")
self.send_cmd(0, rot_speed if err_yaw > 0 else -rot_speed)
# ================= 탐색 패턴 & 유틸 =================
def start_search(self):
pattern = self.search_pattern.get()
if pattern not in VALID_PATTERNS:
messagebox.showwarning("탐색 모드", "나선형, 원형, 사각형, 하트 중 패턴을 선택해 주세요.")
return False
cx, cy = (self.waypoints[-1] if self.waypoints else (self.rx, self.ry))
pts = []
if pattern == "나선형":
for i in range(SEARCH_POINTS):
t = i / SEARCH_POINTS
pts.append((
cx + SEARCH_RADIUS * t * math.cos(t * 8 * math.pi),
cy + SEARCH_RADIUS * t * math.sin(t * 8 * math.pi),
))
elif pattern == "원형":
for i in range(SEARCH_CIRCLE_POINTS):
th = 2 * math.pi * i / SEARCH_CIRCLE_POINTS
pts.append((cx + SEARCH_RADIUS * math.cos(th), cy + SEARCH_RADIUS * math.sin(th)))
elif pattern == "사각형":
r = SEARCH_SQUARE_RADIUS
for y in (-r, 0, r):
pts.append((cx - r, cy + y))
pts.append((cx + r, cy + y))
elif pattern == "하트":
for i in range(SEARCH_POINTS):
t = 2 * math.pi * i / SEARCH_POINTS
x = 16 * math.sin(t) ** 3
y = 13 * math.cos(t) - 5 * math.cos(2 * t) - 2 * math.cos(3 * t) - math.cos(4 * t)
pts.append((cx + x * 2, cy + y * 2))
self.search_waypoints = pts
if self.search_window is None:
self.search_window = SearchMapWindow(self, self.search_waypoints)
else:
self.search_window.reset_path(self.search_waypoints)
self.mode = "SEARCH"
self._arrival_count = 0
self._search_path_started = True
return True
def add_waypoint_click(self, event):
if len(self.waypoints) >= 5:
messagebox.showwarning("입력 제한", "웨이포인트는 최대 5개까지만 설정할 수 있습니다.")
return
cx, cy = CANVAS_SIZE // 2, CANVAS_SIZE // 2
dx, dy = (event.x - cx) / SCALE, (cy - event.y) / SCALE
d = math.hypot(dx, dy)
a = math.atan2(dy, dx) + self.ra - VISUAL_OFFSET
self.waypoints.append((self.rx + d * math.cos(a), self.ry + d * math.sin(a)))
def update_loop(self):
"""UI 전용 루프 (네트워크 없음, 메인 스레드 논블로킹)"""
if self.start_pose is not None:
self.lbl_start_pos.config(
text=(
f"Start: X: {self.start_pose[0] / 100:.2f}, Y: {self.start_pose[1] / 100:.2f}, "
f"A: {math.degrees(self.start_pose[2]):.1f}°"
)
)
self.lbl_current_pos.config(
text=(
f"Current: X: {self.rx / 100:.2f}, Y: {self.ry / 100:.2f}, "
f"A: {math.degrees(self.ra):.1f}°"
)
)
self.lbl_state.config(text=f"상태: {self.mode}")
self.draw_canvas()
# 로그: 로봇이 작동 중일 때만 주기적으로 찍음, IDLE 전환 시 1회만 찍음
is_active = self.mode != "IDLE"
mode_changed = self.mode != self._last_mode
if mode_changed:
self._last_log_time = time.time()
self.update_log() # 상태 변화 시 즉시 1회 로그
elif is_active and time.time() - self._last_log_time >= self._log_interval_sec:
self._last_log_time = time.time()
self.update_log() # 활동 중일 때만 주기적 로그
self._last_mode = self.mode
self.after(INTERVAL, self.update_loop)
# 탐색 시각화
if self.search_window:
try:
self.search_window.draw_lidar_obstacle(
self.rx, self.ry, self.ra, self.lidar_data
)
if self.mode == "SEARCH":
self.search_window.update_robot(
self.rx, self.ry, self.ra
)
except tk.TclError:
self.search_window = None
def draw_canvas(self):
self.canvas.delete("all")
cx, cy = CANVAS_SIZE // 2, CANVAS_SIZE // 2
def to_canvas(wx, wy):
dx, dy = wx - self.rx, wy - self.ry
d = math.hypot(dx, dy)
a = math.atan2(dy, dx) - self.ra + VISUAL_OFFSET
return cx + d * math.cos(a) * SCALE, cy - d * math.sin(a) * SCALE
# 그리드
grid_step = int(GRID_CM * SCALE)
for i in range(0, CANVAS_SIZE, grid_step):
self.canvas.create_line(i, 0, i, CANVAS_SIZE, fill=GRID_COLOR)
self.canvas.create_line(0, i, CANVAS_SIZE, i, fill=GRID_COLOR)
# LIDAR (cos/sin 한 번만 계산)
for i in range(0, len(self.lidar_data), LIDAR_SKIP):
d = self.lidar_data[i] / DIST_DIV
if MIN_DIST < d < MAX_DIST:
ang = math.radians(i) + VISUAL_OFFSET
px = cx + d * LIDAR_SCALE_CM * math.cos(ang) * SCALE
py = cy - d * LIDAR_SCALE_CM * math.sin(ang) * SCALE
self.canvas.create_rectangle(px, py, px + 2, py + 2, fill=WALL_COLOR, outline="")
# 경로 흔적 (포인트 많을 때 샘플링으로 렌더링 부하 감소)
if len(self.path_history) > 1:
hist = list(self.path_history)
if len(hist) > 150:
hist = hist[::PATH_DISPLAY_STEP]
flat_pts = [c for pt in hist for c in to_canvas(pt[0], pt[1])]
if len(flat_pts) >= 4:
self.canvas.create_line(flat_pts, fill=PATH_COLOR, width=2)
# 웨이포인트
prev = (cx, cy)
for wx, wy in self.waypoints:
sx, sy = to_canvas(wx, wy)
self.canvas.create_line(prev[0], prev[1], sx, sy, fill=WAYPOINT_COLOR, dash=(4, 2))
self.canvas.create_oval(sx - 4, sy - 4, sx + 4, sy + 4, fill=WAYPOINT_COLOR, outline="white")
prev = (sx, sy)
# 탐색 경로
if self.search_waypoints:
s_pts = [c for pt in self.search_waypoints for c in to_canvas(pt[0], pt[1])]
if len(s_pts) >= 4:
self.canvas.create_line(s_pts, fill=SEARCH_COLOR, width=1, dash=(2, 2))
# 로봇
self.canvas.create_oval(cx - 12, cy - 12, cx + 12, cy + 12, fill="blue", width=2)
self.canvas.create_line(cx, cy, cx, cy - 25, fill="red", arrow=tk.LAST, width=3)
def start_waypoints(self):
self.mode = "WAYPOINT" if self.waypoints else "IDLE"
self._arrival_count = 0
def start_return(self):
self.return_phase = "MOVE"
self.mode = "RETURN"
self._arrival_count = 0
def stop_robot(self):
self.mode = "IDLE";
self.send_cmd(0, 0)
def clear_waypoints(self):
self.waypoints.clear()
self.search_waypoints.clear()
self.path_history.clear()
def optimize_path(self):
"""동적 프로그래밍으로 최적 경로 계산 (TSP 문제 해결)"""
if len(self.waypoints) < 2:
return
points = [(self.rx, self.ry)] + self.waypoints
n = len(points)
if n <= 2:
return
# 거리 함수
def dist(i, j):
return math.hypot(points[i][0] - points[j][0], points[i][1] - points[j][1])
# 모든 점 간 거리 행렬
dist_matrix = [[dist(i, j) for j in range(n)] for i in range(n)]
# DP[mask][i] = 방문한 점들(비트마스크), 현재 위치 i일 때의 최단거리
INF = float('inf')
dp = [[INF] * n for _ in range(1 << n)]
parent = [[-1] * n for _ in range(1 << n)]
# 시작점(0)에서 시작
dp[1][0] = 0
# 모든 부분집합 상태 순회
for mask in range(1 << n):
for u in range(n):
if dp[mask][u] == INF or not ((mask >> u) & 1):
continue
# u에서 방문하지 않은 다음 점으로
for v in range(n):
if (mask >> v) & 1: # 이미 방문
continue
new_mask = mask | (1 << v)
new_dist = dp[mask][u] + dist_matrix[u][v]
if new_dist < dp[new_mask][v]:
dp[new_mask][v] = new_dist
parent[new_mask][v] = u
# 모든 점 방문한 최종 상태에서 가장 가까운 점
full_mask = (1 << n) - 1
last = min(range(1, n), key=lambda i: dp[full_mask][i])
# 경로 역추적
path = []
mask = full_mask
curr = last
while curr != 0:
path.append(curr)
prev = parent[mask][curr]
mask ^= (1 << curr)
curr = prev
path.reverse()
# 웨이포인트만 추출
self.waypoints = [points[i] for i in path]
def send_cmd(self, lin, ang):
try:
requests.get(URL, params={"lin": f"{lin:.3f}", "ang": f"{ang:.3f}"}, timeout=0.1)
except requests.RequestException:
pass
# ___________________________________________________탐색 시각화___________________________________________________
class SearchMapWindow:
"""
탐색 전용 확대 지도 창
- world-fixed view
- 탐색 경로 전체 표시
- 장애물(LIDAR) 누적 표시
"""
def __init__(self, parent, search_waypoints):
self.win = tk.Toplevel(parent)
self.win.title("Search Map View")
self.win.geometry("700x700")
self.canvas_size = 650
self.canvas = tk.Canvas(
self.win, width=self.canvas_size, height=self.canvas_size, bg="white"
)
self.canvas.pack(expand=True, fill="both")
self.search_waypoints = list(search_waypoints)
self._recalc_scale()
self.draw_search_path()
self.robot_path = []
self.search_started = False
def _recalc_scale(self):
xs = [p[0] for p in self.search_waypoints] if self.search_waypoints else [0]
ys = [p[1] for p in self.search_waypoints] if self.search_waypoints else [0]
self.min_x, self.max_x = min(xs), max(xs)
self.min_y, self.max_y = min(ys), max(ys)
span = max(self.max_x - self.min_x, self.max_y - self.min_y)
self.scale = (self.canvas_size * 0.8) / max(span, 1)
self.origin_x = self.canvas_size / 2
self.origin_y = self.canvas_size / 2
def reset_path(self, search_waypoints):
self.canvas.delete("all")
self.search_waypoints = list(search_waypoints)
self._recalc_scale()
self.draw_search_path()
self.robot_path = []
self.search_started = False
def world_to_canvas(self, x, y):
cx = self.origin_x + (x - (self.min_x + self.max_x) / 2) * self.scale
cy = self.origin_y - (y - (self.min_y + self.max_y) / 2) * self.scale
return cx, cy
def draw_search_path(self):
pts = []
for x, y in self.search_waypoints:
pts.extend(self.world_to_canvas(x, y))
if len(pts) >= 4:
self.canvas.create_line(
pts, fill=SEARCH_COLOR, width=2, dash=(3, 2)
)
def draw_lidar_obstacle(self, rx, ry, ra, lidar_data):
for i in range(0, len(lidar_data), LIDAR_SKIP):
d = lidar_data[i] / DIST_DIV
if MIN_DIST < d < MAX_DIST:
ang = math.radians(i)
wx = rx + d * 100 * math.cos(ang + ra)
wy = ry + d * 100 * math.sin(ang + ra)
cx, cy = self.world_to_canvas(wx, wy)
self.canvas.create_rectangle(
cx, cy, cx + 2, cy + 2,
fill=WALL_COLOR, outline=""
)
def update_robot(self, rx, ry, ra):
if not self.search_started:
self.search_started = True
self.robot_path.append((rx, ry))
self.draw_robot_path()
self.draw_robot(rx, ry, ra)
def draw_robot_path(self):
if len(self.robot_path) < 2:
return
pts = []
for x, y in self.robot_path:
pts.extend(self.world_to_canvas(x, y))
if len(pts) >= 4:
self.canvas.create_line(
pts,
fill=PATH_COLOR,
width=2
)
def draw_robot(self, rx, ry, ra):
self.canvas.delete("robot")
cx, cy = self.world_to_canvas(rx, ry)
self.canvas.create_oval(cx - 6, cy - 6, cx + 6, cy + 6, fill="blue", width=1, tags="robot")
hx = cx + 12 * math.cos(ra)
hy = cy - 12 * math.sin(ra)
self.canvas.create_line(cx, cy, hx, hy, fill="red", arrow=tk.LAST, width=2, tags="robot")
if __name__ == "__main__":
root = tk.Tk()
root.title("Integrated Robot Controller - Request Updated")
RobotController(root).pack(expand=True, fill="both")
root.mainloop()-- CREATE TABLE log (
-- id BIGINT AUTO_INCREMENT PRIMARY KEY,
-- ts DATETIME DEFAULT CURRENT_TIMESTAMP,
-- source VARCHAR(50), -- main.py, controller 등
-- level VARCHAR(10), -- INFO, WARN, ERROR
-- message TEXT, -- tkinter에 찍히는 로그 그대로
-- rx FLOAT NULL,
-- ry FLOAT NULL,
-- theta FLOAT NULL
-- );
-- ALTER TABLE log
-- ADD COLUMN state VARCHAR(32) NULL,
-- ADD COLUMN pos_x FLOAT NULL,
-- ADD COLUMN pos_y FLOAT NULL,
-- ADD COLUMN obstacle BOOLEAN NULL,
-- ADD COLUMN obstacle_desc VARCHAR(255) NULL,
-- ADD COLUMN front_type VARCHAR(16) NULL;
-- 구조 확인
-- SHOW TABLES;
-- DESC log;
-- 가장 최근에 로그를 남긴 source
SELECT source
FROM log
ORDER BY id DESC
LIMIT 1;
-- 전체 로그
SELECT
ts,
source,
state,
pos_x,
pos_y,
obstacle,
front_type
FROM log
WHERE source = (
SELECT source
FROM log
ORDER BY id DESC
LIMIT 1
)
ORDER BY id DESC
LIMIT 100;
-- 장애물 로그만
SELECT
ts,
state,
obstacle_desc,
front_type
FROM log
WHERE obstacle = 1
AND source = (
SELECT source
FROM log
ORDER BY id DESC
LIMIT 1
)
ORDER BY ts DESC;
-- return 중 장애물
SELECT *
FROM log
WHERE state LIKE 'RETURN%'
AND obstacle = 1
AND source = (
SELECT source
FROM log
ORDER BY id DESC
LIMIT 1
)
ORDER BY ts DESC;
-- 실행별 상태 변화 흐름
SELECT
ts,
state,
obstacle,
front_type
FROM log
WHERE source = (
SELECT source
FROM log
ORDER BY id DESC
LIMIT 1
)
ORDER BY ts ASC;
-- 실행별 source 목록(디버깅용)
SELECT
source,
COUNT(*) AS log_count,
MIN(ts) AS start_time,
MAX(ts) AS end_time
FROM log
GROUP BY source
ORDER BY end_time DESC;
역할
ROI 탐색기능, DB, 센서 감지(맵 스캐너), 자체 시뮬레이션

'로보테크AI' 카테고리의 다른 글
| 융합_로보테크 AI 자율주행 로봇 개발자 과정-26/02/10[C++] (0) | 2026.02.10 |
|---|---|
| 융합_로보테크 AI 자율주행 로봇 개발자 과정-26/02/09[Git] (0) | 2026.02.09 |
| 융합_로보테크 AI 자율주행 로봇 개발자 과정-26/02/04 (0) | 2026.02.04 |
| 융합_로보테크 AI 자율주행 로봇 개발자 과정-26/02/03 (0) | 2026.02.03 |
| 융합_로보테크 AI 자율주행 로봇 개발자 과정-26/02/02 (0) | 2026.02.02 |